
python_code
stringlengths 0
187k
| repo_name
stringlengths 8
46
| file_path
stringlengths 6
135
|
|---|---|---|
allenact-main
|
projects/objectnav_baselines/experiments/robothor/clip/__init__.py
|
|
from typing import Sequence, Union
import torch.nn as nn
from allenact.base_abstractions.preprocessor import Preprocessor
from allenact.utils.experiment_utils import Builder, TrainingPipeline
from allenact_plugins.clip_plugin.clip_preprocessors import ClipResNetPreprocessor
from allenact_plugins.ithor_plugin.ithor_sensors import (
GoalObjectTypeThorSensor,
RGBSensorThor,
)
from projects.objectnav_baselines.experiments.clip.mixins import (
ClipResNetPreprocessGRUActorCriticMixin,
)
from projects.objectnav_baselines.experiments.robothor.objectnav_robothor_base import (
ObjectNavRoboThorBaseConfig,
)
from projects.objectnav_baselines.mixins import ObjectNavPPOMixin
class ObjectNavRoboThorClipRGBPPOExperimentConfig(ObjectNavRoboThorBaseConfig):
"""An Object Navigation experiment configuration in RoboThor with RGB
input."""
CLIP_MODEL_TYPE = "RN50"
SENSORS = [
RGBSensorThor(
height=ObjectNavRoboThorBaseConfig.SCREEN_SIZE,
width=ObjectNavRoboThorBaseConfig.SCREEN_SIZE,
use_resnet_normalization=True,
uuid="rgb_lowres",
mean=ClipResNetPreprocessor.CLIP_RGB_MEANS,
stdev=ClipResNetPreprocessor.CLIP_RGB_STDS,
),
GoalObjectTypeThorSensor(
object_types=ObjectNavRoboThorBaseConfig.TARGET_TYPES,
),
]
def __init__(self, add_prev_actions: bool = False, **kwargs):
super().__init__(**kwargs)
self.preprocessing_and_model = ClipResNetPreprocessGRUActorCriticMixin(
sensors=self.SENSORS,
clip_model_type=self.CLIP_MODEL_TYPE,
screen_size=self.SCREEN_SIZE,
goal_sensor_type=GoalObjectTypeThorSensor,
)
self.add_prev_actions = add_prev_actions
def training_pipeline(self, **kwargs) -> TrainingPipeline:
return ObjectNavPPOMixin.training_pipeline(
auxiliary_uuids=[],
multiple_beliefs=False,
advance_scene_rollout_period=self.ADVANCE_SCENE_ROLLOUT_PERIOD,
)
def preprocessors(self) -> Sequence[Union[Preprocessor, Builder[Preprocessor]]]:
return self.preprocessing_and_model.preprocessors()
def create_model(self, **kwargs) -> nn.Module:
return self.preprocessing_and_model.create_model(
num_actions=self.ACTION_SPACE.n,
add_prev_actions=self.add_prev_actions,
**kwargs
)
@classmethod
def tag(cls):
return "ObjectNav-RoboTHOR-RGB-ClipResNet50GRU-DDPPO"
|
allenact-main
|
projects/objectnav_baselines/experiments/robothor/clip/objectnav_robothor_rgb_clipresnet50gru_ddppo.py
|
from typing import Sequence, Union
import torch.nn as nn
from allenact.base_abstractions.preprocessor import Preprocessor
from allenact.utils.experiment_utils import Builder, TrainingPipeline
from allenact_plugins.clip_plugin.clip_preprocessors import ClipResNetPreprocessor
from allenact_plugins.ithor_plugin.ithor_sensors import (
GoalObjectTypeThorSensor,
RGBSensorThor,
)
from projects.objectnav_baselines.experiments.clip.mixins import (
ClipResNetPreprocessGRUActorCriticMixin,
)
from projects.objectnav_baselines.experiments.robothor.objectnav_robothor_base import (
ObjectNavRoboThorBaseConfig,
)
from projects.objectnav_baselines.mixins import ObjectNavPPOMixin
class ObjectNavRoboThorRGBPPOExperimentConfig(ObjectNavRoboThorBaseConfig):
"""An Object Navigation experiment configuration in RoboThor with RGB
input."""
CLIP_MODEL_TYPE = "RN50x16"
SENSORS = [
RGBSensorThor(
height=ObjectNavRoboThorBaseConfig.SCREEN_SIZE,
width=ObjectNavRoboThorBaseConfig.SCREEN_SIZE,
use_resnet_normalization=True,
uuid="rgb_lowres",
mean=ClipResNetPreprocessor.CLIP_RGB_MEANS,
stdev=ClipResNetPreprocessor.CLIP_RGB_STDS,
),
GoalObjectTypeThorSensor(
object_types=ObjectNavRoboThorBaseConfig.TARGET_TYPES,
),
]
def __init__(self, add_prev_actions: bool = False, **kwargs):
super().__init__(**kwargs)
self.preprocessing_and_model = ClipResNetPreprocessGRUActorCriticMixin(
sensors=self.SENSORS,
clip_model_type=self.CLIP_MODEL_TYPE,
screen_size=self.SCREEN_SIZE,
goal_sensor_type=GoalObjectTypeThorSensor,
)
self.add_prev_actions = add_prev_actions
def training_pipeline(self, **kwargs) -> TrainingPipeline:
return ObjectNavPPOMixin.training_pipeline(
auxiliary_uuids=[],
multiple_beliefs=False,
advance_scene_rollout_period=self.ADVANCE_SCENE_ROLLOUT_PERIOD,
)
def preprocessors(self) -> Sequence[Union[Preprocessor, Builder[Preprocessor]]]:
return self.preprocessing_and_model.preprocessors()
def create_model(self, **kwargs) -> nn.Module:
return self.preprocessing_and_model.create_model(
num_actions=self.ACTION_SPACE.n,
add_prev_actions=self.add_prev_actions,
**kwargs
)
@classmethod
def tag(cls):
return "ObjectNav-RoboTHOR-RGB-ClipResNet50x16GRU-DDPPO"
|
allenact-main
|
projects/objectnav_baselines/experiments/robothor/clip/objectnav_robothor_rgb_clipresnet50x16gru_ddppo.py
|
allenact-main
|
projects/objectnav_baselines/experiments/habitat/__init__.py
|
|
import glob
import math
import os
import warnings
from abc import ABC
from typing import Dict, Any, List, Optional, Sequence, Union, Tuple
import gym
import numpy as np
import torch
from torch.distributions.utils import lazy_property
# noinspection PyUnresolvedReferences
import habitat
from allenact.base_abstractions.experiment_config import MachineParams
from allenact.base_abstractions.preprocessor import (
SensorPreprocessorGraph,
Preprocessor,
)
from allenact.base_abstractions.sensor import SensorSuite
from allenact.base_abstractions.task import TaskSampler
from allenact.embodiedai.sensors.vision_sensors import RGBSensor, DepthSensor
from allenact.utils.experiment_utils import evenly_distribute_count_into_bins, Builder
from allenact.utils.system import get_logger
from allenact_plugins.habitat_plugin.habitat_constants import (
HABITAT_DATASETS_DIR,
HABITAT_CONFIGS_DIR,
HABITAT_SCENE_DATASETS_DIR,
)
from allenact_plugins.habitat_plugin.habitat_task_samplers import ObjectNavTaskSampler
from allenact_plugins.habitat_plugin.habitat_tasks import ObjectNavTask
from allenact_plugins.habitat_plugin.habitat_utils import (
get_habitat_config,
construct_env_configs,
)
from projects.objectnav_baselines.experiments.objectnav_base import ObjectNavBaseConfig
def create_objectnav_config(
config_yaml_path: str,
mode: str,
scenes_path: str,
simulator_gpu_ids: Sequence[int],
rotation_degrees: float,
step_size: float,
max_steps: int,
num_processes: int,
camera_width: int,
camera_height: int,
using_rgb: bool,
using_depth: bool,
training: bool,
num_episode_sample: int,
horizontal_fov: Optional[int] = None,
) -> habitat.Config:
config = get_habitat_config(config_yaml_path)
config.defrost()
config.NUM_PROCESSES = num_processes
config.SIMULATOR_GPU_IDS = simulator_gpu_ids
config.DATASET.SCENES_DIR = HABITAT_SCENE_DATASETS_DIR
config.DATASET.DATA_PATH = scenes_path
config.SIMULATOR.AGENT_0.SENSORS = []
if using_rgb:
config.SIMULATOR.AGENT_0.SENSORS.append("RGB_SENSOR")
if using_depth:
config.SIMULATOR.AGENT_0.SENSORS.append("DEPTH_SENSOR")
config.SIMULATOR.RGB_SENSOR.WIDTH = camera_width
config.SIMULATOR.RGB_SENSOR.HEIGHT = camera_height
config.SIMULATOR.DEPTH_SENSOR.WIDTH = camera_width
config.SIMULATOR.DEPTH_SENSOR.HEIGHT = camera_height
config.SIMULATOR.SEMANTIC_SENSOR.WIDTH = camera_width
config.SIMULATOR.SEMANTIC_SENSOR.HEIGHT = camera_height
if horizontal_fov is not None:
config.SIMULATOR.RGB_SENSOR.HFOV = horizontal_fov
config.SIMULATOR.DEPTH_SENSOR.HFOV = horizontal_fov
config.SIMULATOR.SEMANTIC_SENSOR.HFOV = horizontal_fov
assert rotation_degrees == config.SIMULATOR.TURN_ANGLE
assert step_size == config.SIMULATOR.FORWARD_STEP_SIZE
assert max_steps == config.ENVIRONMENT.MAX_EPISODE_STEPS
config.SIMULATOR.MAX_EPISODE_STEPS = max_steps
assert config.TASK.TYPE == "ObjectNav-v1"
assert config.TASK.SUCCESS.SUCCESS_DISTANCE == 0.1
assert config.TASK.DISTANCE_TO_GOAL.DISTANCE_TO == "VIEW_POINTS"
config.TASK.SENSORS = ["OBJECTGOAL_SENSOR", "COMPASS_SENSOR", "GPS_SENSOR"]
config.TASK.GOAL_SENSOR_UUID = "objectgoal"
config.TASK.MEASUREMENTS = ["DISTANCE_TO_GOAL", "SUCCESS", "SPL", "SOFT_SPL"]
if not training:
config.SEED = 0
config.ENVIRONMENT.ITERATOR_OPTIONS.SHUFFLE = False
if num_episode_sample > 0:
config.ENVIRONMENT.ITERATOR_OPTIONS.NUM_EPISODE_SAMPLE = num_episode_sample
config.MODE = mode
config.freeze()
return config
class ObjectNavHabitatBaseConfig(ObjectNavBaseConfig, ABC):
"""The base config for all Habitat ObjectNav experiments."""
# selected auxiliary uuids
## if comment all the keys, then it's vanilla DD-PPO
_AUXILIARY_UUIDS = [
# InverseDynamicsLoss.UUID,
# TemporalDistanceLoss.UUID,
# CPCA1Loss.UUID,
# CPCA4Loss.UUID,
# CPCA8Loss.UUID,
# CPCA16Loss.UUID,
]
MULTIPLE_BELIEFS = False
BELIEF_FUSION = ( # choose one
None
# AttentiveFusion
# AverageFusion
# SoftmaxFusion
)
FAILED_END_REWARD = -1.0
ACTION_SPACE = gym.spaces.Discrete(len(ObjectNavTask.class_action_names()))
DEFAULT_NUM_TRAIN_PROCESSES = (
5 * torch.cuda.device_count() if torch.cuda.is_available() else 1
)
DEFAULT_NUM_TEST_PROCESSES = 11
DEFAULT_TRAIN_GPU_IDS = tuple(range(torch.cuda.device_count()))
DEFAULT_VALID_GPU_IDS = [torch.cuda.device_count() - 1]
DEFAULT_TEST_GPU_IDS = tuple(range(torch.cuda.device_count()))
def __init__(
self,
scene_dataset: str, # Should be "mp3d" or "hm3d"
debug: bool = False,
num_train_processes: Optional[int] = None,
num_test_processes: Optional[int] = None,
test_on_validation: bool = False,
run_valid: bool = True,
train_gpu_ids: Optional[Sequence[int]] = None,
val_gpu_ids: Optional[Sequence[int]] = None,
test_gpu_ids: Optional[Sequence[int]] = None,
add_prev_actions: bool = False,
look_constraints: Optional[Tuple[int, int]] = None,
**kwargs,
):
super().__init__(**kwargs)
self.scene_dataset = scene_dataset
self.debug = debug
assert look_constraints is None or all(
lc in [0, 1, 2, 3] for lc in look_constraints
), "Look constraints limit the number of times agents can look up/down when starting from the horizon line."
assert (
look_constraints is None or look_constraints[1] > 0
), "The agent must be allowed to look down from the horizon at least once."
self.look_constraints = look_constraints
def v_or_default(v, default):
return v if v is not None else default
self.num_train_processes = v_or_default(
num_train_processes, self.DEFAULT_NUM_TRAIN_PROCESSES
)
self.num_test_processes = v_or_default(
num_test_processes, (10 if torch.cuda.is_available() else 1)
)
self.test_on_validation = test_on_validation
self.run_valid = run_valid
self.train_gpu_ids = v_or_default(train_gpu_ids, self.DEFAULT_TRAIN_GPU_IDS)
self.val_gpu_ids = v_or_default(
val_gpu_ids, self.DEFAULT_VALID_GPU_IDS if run_valid else []
)
self.test_gpu_ids = v_or_default(test_gpu_ids, self.DEFAULT_TEST_GPU_IDS)
self.add_prev_actions = add_prev_actions
self.auxiliary_uuids = self._AUXILIARY_UUIDS
def _create_config(
self,
mode: str,
scenes_path: str,
num_processes: int,
simulator_gpu_ids: Sequence[int],
training: bool = True,
num_episode_sample: int = -1,
):
return create_objectnav_config(
config_yaml_path=self.BASE_CONFIG_YAML_PATH,
mode=mode,
scenes_path=scenes_path,
simulator_gpu_ids=simulator_gpu_ids,
rotation_degrees=self.ROTATION_DEGREES,
step_size=self.STEP_SIZE,
max_steps=self.MAX_STEPS,
num_processes=num_processes,
camera_width=self.CAMERA_WIDTH,
camera_height=self.CAMERA_HEIGHT,
horizontal_fov=self.HORIZONTAL_FIELD_OF_VIEW,
using_rgb=any(isinstance(s, RGBSensor) for s in self.SENSORS),
using_depth=any(isinstance(s, DepthSensor) for s in self.SENSORS),
training=training,
num_episode_sample=num_episode_sample,
)
@lazy_property
def DEFAULT_OBJECT_CATEGORIES_TO_IND(self):
if self.scene_dataset == "mp3d":
return {
"chair": 0,
"table": 1,
"picture": 2,
"cabinet": 3,
"cushion": 4,
"sofa": 5,
"bed": 6,
"chest_of_drawers": 7,
"plant": 8,
"sink": 9,
"toilet": 10,
"stool": 11,
"towel": 12,
"tv_monitor": 13,
"shower": 14,
"bathtub": 15,
"counter": 16,
"fireplace": 17,
"gym_equipment": 18,
"seating": 19,
"clothes": 20,
}
elif self.scene_dataset == "hm3d":
return {
"chair": 0,
"bed": 1,
"plant": 2,
"toilet": 3,
"tv_monitor": 4,
"sofa": 5,
}
else:
raise NotImplementedError
@lazy_property
def TASK_DATA_DIR_TEMPLATE(self):
return os.path.join(
HABITAT_DATASETS_DIR, f"objectnav/{self.scene_dataset}/v1/{{}}/{{}}.json.gz"
)
@lazy_property
def BASE_CONFIG_YAML_PATH(self):
return os.path.join(
HABITAT_CONFIGS_DIR, f"tasks/objectnav_{self.scene_dataset}.yaml"
)
@lazy_property
def TRAIN_CONFIG(self):
return self._create_config(
mode="train",
scenes_path=self.train_scenes_path(),
num_processes=self.num_train_processes,
simulator_gpu_ids=self.train_gpu_ids,
training=True,
)
@lazy_property
def VALID_CONFIG(self):
return self._create_config(
mode="validate",
scenes_path=self.valid_scenes_path(),
num_processes=1,
simulator_gpu_ids=self.val_gpu_ids,
training=False,
num_episode_sample=200,
)
@lazy_property
def TEST_CONFIG(self):
return self._create_config(
mode="validate",
scenes_path=self.test_scenes_path(),
num_processes=self.num_test_processes,
simulator_gpu_ids=self.test_gpu_ids,
training=False,
)
@lazy_property
def TRAIN_CONFIGS_PER_PROCESS(self):
configs = construct_env_configs(self.TRAIN_CONFIG, allow_scene_repeat=True)
if len(self.train_gpu_ids) >= 2:
scenes_dir = configs[0].DATASET.SCENES_DIR
memory_use_per_config = []
for config in configs:
assert (
len(config.DATASET.CONTENT_SCENES) == 1
), config.DATASET.CONTENT_SCENES
scene_name = config.DATASET.CONTENT_SCENES[0]
paths = glob.glob(
os.path.join(
scenes_dir, self.scene_dataset, "**", f"{scene_name}.*"
),
recursive=True,
)
if self.scene_dataset == "mp3d":
assert len(paths) == 4
else:
assert len(paths) == 2
memory_use_per_config.append(sum(os.path.getsize(p) for p in paths))
max_configs_per_device = math.ceil(len(configs) / len(self.train_gpu_ids))
mem_per_device = np.array([0.0 for _ in range(len(self.train_gpu_ids))])
configs_per_device = [[] for _ in range(len(mem_per_device))]
for mem, config in sorted(
list(zip(memory_use_per_config, configs)), key=lambda x: x[0]
):
ind = int(np.argmin(mem_per_device))
config.defrost()
config.SIMULATOR.HABITAT_SIM_V0.GPU_DEVICE_ID = self.train_gpu_ids[ind]
config.freeze()
configs_per_device[ind].append(config)
mem_per_device[ind] += mem
if len(configs_per_device[ind]) >= max_configs_per_device:
mem_per_device[ind] = float("inf")
configs_per_device.sort(key=lambda x: len(x))
configs = sum(configs_per_device, [])
if self.debug:
warnings.warn(
"IN DEBUG MODE, WILL ONLY USE `1LXtFkjw3qL` SCENE IN MP3D OR `1S7LAXRdDqK` scene in HM3D!!!"
)
for config in configs:
config.defrost()
if self.scene_dataset == "mp3d":
config.DATASET.CONTENT_SCENES = ["1LXtFkjw3qL"]
elif self.scene_dataset == "hm3d":
config.DATASET.CONTENT_SCENES = ["1S7LAXRdDqK"]
else:
raise NotImplementedError
config.freeze()
return configs
@lazy_property
def TEST_CONFIG_PER_PROCESS(self):
return construct_env_configs(self.TEST_CONFIG, allow_scene_repeat=False)
def train_scenes_path(self):
return self.TASK_DATA_DIR_TEMPLATE.format(*(["train"] * 2))
def valid_scenes_path(self):
return self.TASK_DATA_DIR_TEMPLATE.format(*(["val"] * 2))
def test_scenes_path(self):
get_logger().warning("Running tests on the validation set!")
return self.TASK_DATA_DIR_TEMPLATE.format(*(["val"] * 2))
# return self.TASK_DATA_DIR_TEMPLATE.format(*(["test"] * 2))
def tag(self):
t = f"ObjectNav-Habitat-{self.scene_dataset.upper()}"
if self.add_prev_actions:
t = f"{t}-PrevActions"
if self.look_constraints is not None:
t = f"{t}-Look{','.join(map(str, self.look_constraints))}"
return t
def preprocessors(self) -> Sequence[Union[Preprocessor, Builder[Preprocessor]]]:
return tuple()
def machine_params(self, mode="train", **kwargs):
has_gpus = torch.cuda.is_available()
if not has_gpus:
gpu_ids = []
nprocesses = 1
elif mode == "train":
gpu_ids = self.train_gpu_ids
nprocesses = self.num_train_processes
elif mode == "valid":
gpu_ids = self.val_gpu_ids
nprocesses = 1 if self.run_valid else 0
elif mode == "test":
gpu_ids = self.test_gpu_ids
nprocesses = self.num_test_processes
else:
raise NotImplementedError("mode must be 'train', 'valid', or 'test'.")
if has_gpus:
nprocesses = evenly_distribute_count_into_bins(nprocesses, len(gpu_ids))
sensor_preprocessor_graph = (
SensorPreprocessorGraph(
source_observation_spaces=SensorSuite(self.SENSORS).observation_spaces,
preprocessors=self.preprocessors(),
)
if mode == "train"
or (
(isinstance(nprocesses, int) and nprocesses > 0)
or (isinstance(nprocesses, Sequence) and sum(nprocesses) > 0)
)
else None
)
return MachineParams(
nprocesses=nprocesses,
devices=gpu_ids,
sensor_preprocessor_graph=sensor_preprocessor_graph,
)
def make_sampler_fn(self, **kwargs) -> TaskSampler:
return ObjectNavTaskSampler(
task_kwargs={"look_constraints": self.look_constraints,},
**{"failed_end_reward": self.FAILED_END_REWARD, **kwargs}, # type: ignore
)
def train_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
config = self.TRAIN_CONFIGS_PER_PROCESS[process_ind]
return {
"env_config": config,
"max_steps": self.MAX_STEPS,
"sensors": self.SENSORS,
"action_space": self.ACTION_SPACE,
}
def valid_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
if total_processes != 1:
raise NotImplementedError(
"In validation, `total_processes` must equal 1 for habitat tasks"
)
return {
"env_config": self.VALID_CONFIG,
"max_steps": self.MAX_STEPS,
"sensors": self.SENSORS,
"action_space": gym.spaces.Discrete(
len(ObjectNavTask.class_action_names())
),
}
def test_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
config = self.TEST_CONFIG_PER_PROCESS[process_ind]
return {
"env_config": config,
"max_steps": self.MAX_STEPS,
"sensors": self.SENSORS,
"action_space": gym.spaces.Discrete(
len(ObjectNavTask.class_action_names())
),
}
|
allenact-main
|
projects/objectnav_baselines/experiments/habitat/objectnav_habitat_base.py
|
allenact-main
|
projects/objectnav_baselines/experiments/habitat/clip/__init__.py
|
|
import torch
import torch.optim as optim
from allenact.algorithms.onpolicy_sync.losses import PPO
from allenact.algorithms.onpolicy_sync.losses.ppo import PPOConfig
from allenact.utils.experiment_utils import (
Builder,
TrainingPipeline,
PipelineStage,
TrainingSettings,
)
from projects.objectnav_baselines.experiments.habitat.clip.objectnav_habitat_rgb_clipresnet50gru_ddppo import (
ObjectNavHabitatRGBClipResNet50GRUDDPPOExperimentConfig,
)
from projects.objectnav_baselines.mixins import update_with_auxiliary_losses
class ObjectNavHabitatRGBClipResNet50GRUDDPPOIncreasingLengthExpConfig(
ObjectNavHabitatRGBClipResNet50GRUDDPPOExperimentConfig
):
def __init__(self, lr=1e-4, **kwargs):
super().__init__(lr, **kwargs)
self.lr = lr
def training_pipeline(self, **kwargs) -> TrainingPipeline:
auxiliary_uuids = self.auxiliary_uuids
multiple_beliefs = False
normalize_advantage = False
advance_scene_rollout_period = self.ADVANCE_SCENE_ROLLOUT_PERIOD
log_interval_small = (
self.num_train_processes * 32 * 10 if torch.cuda.is_available() else 1
)
log_interval_med = (
self.num_train_processes * 64 * 5 if torch.cuda.is_available() else 1
)
log_interval_large = (
self.num_train_processes * 128 * 5 if torch.cuda.is_available() else 1
)
batch_steps_0 = int(10e6)
batch_steps_1 = int(10e6)
batch_steps_2 = int(1e9) - batch_steps_0 - batch_steps_1
lr = self.lr
num_mini_batch = 1
update_repeats = 4
save_interval = 5000000
gamma = 0.99
use_gae = True
gae_lambda = 0.95
max_grad_norm = 0.5
named_losses = {
"ppo_loss": (PPO(**PPOConfig, normalize_advantage=normalize_advantage), 1.0)
}
named_losses = update_with_auxiliary_losses(
named_losses=named_losses,
auxiliary_uuids=auxiliary_uuids,
multiple_beliefs=multiple_beliefs,
)
return TrainingPipeline(
save_interval=save_interval,
optimizer_builder=Builder(optim.Adam, dict(lr=lr)),
num_mini_batch=num_mini_batch,
update_repeats=update_repeats,
max_grad_norm=max_grad_norm,
named_losses={key: val[0] for key, val in named_losses.items()},
gamma=gamma,
use_gae=use_gae,
gae_lambda=gae_lambda,
advance_scene_rollout_period=advance_scene_rollout_period,
pipeline_stages=[
PipelineStage(
loss_names=list(named_losses.keys()),
max_stage_steps=batch_steps_0,
training_settings=TrainingSettings(
num_steps=32, metric_accumulate_interval=log_interval_small
),
),
PipelineStage(
loss_names=list(named_losses.keys()),
max_stage_steps=batch_steps_1,
training_settings=TrainingSettings(
num_steps=64, metric_accumulate_interval=log_interval_med,
),
),
PipelineStage(
loss_names=list(named_losses.keys()),
max_stage_steps=batch_steps_2,
training_settings=TrainingSettings(
num_steps=128, metric_accumulate_interval=log_interval_large,
),
),
],
lr_scheduler_builder=None,
)
def tag(self):
return (
super(
ObjectNavHabitatRGBClipResNet50GRUDDPPOIncreasingLengthExpConfig, self
)
.tag()
.replace("-DDPPO-lr", "-DDPPO-IncRollouts-lr")
)
|
allenact-main
|
projects/objectnav_baselines/experiments/habitat/clip/objectnav_habitat_rgb_clipresnet50gru_ddppo_increasingrollouts.py
|
from typing import Sequence, Union
import torch.nn as nn
from torch.distributions.utils import lazy_property
from allenact.base_abstractions.preprocessor import Preprocessor
from allenact.utils.experiment_utils import Builder, TrainingPipeline
from allenact_plugins.clip_plugin.clip_preprocessors import ClipResNetPreprocessor
from allenact_plugins.habitat_plugin.habitat_sensors import (
RGBSensorHabitat,
TargetObjectSensorHabitat,
)
from projects.objectnav_baselines.experiments.clip.mixins import (
ClipResNetPreprocessGRUActorCriticMixin,
)
from projects.objectnav_baselines.experiments.habitat.objectnav_habitat_base import (
ObjectNavHabitatBaseConfig,
)
from projects.objectnav_baselines.mixins import ObjectNavPPOMixin
class ObjectNavHabitatRGBClipResNet50GRUDDPPOExperimentConfig(
ObjectNavHabitatBaseConfig
):
"""An Object Navigation experiment configuration in Habitat."""
CLIP_MODEL_TYPE = "RN50"
def __init__(self, lr: float, **kwargs):
super().__init__(**kwargs)
self.lr = lr
self.preprocessing_and_model = ClipResNetPreprocessGRUActorCriticMixin(
sensors=self.SENSORS,
clip_model_type=self.CLIP_MODEL_TYPE,
screen_size=self.SCREEN_SIZE,
goal_sensor_type=TargetObjectSensorHabitat,
)
@lazy_property
def SENSORS(self):
return [
RGBSensorHabitat(
height=ObjectNavHabitatBaseConfig.SCREEN_SIZE,
width=ObjectNavHabitatBaseConfig.SCREEN_SIZE,
use_resnet_normalization=True,
mean=ClipResNetPreprocessor.CLIP_RGB_MEANS,
stdev=ClipResNetPreprocessor.CLIP_RGB_STDS,
),
TargetObjectSensorHabitat(len(self.DEFAULT_OBJECT_CATEGORIES_TO_IND)),
]
def training_pipeline(self, **kwargs) -> TrainingPipeline:
return ObjectNavPPOMixin.training_pipeline(
lr=self.lr,
auxiliary_uuids=self.auxiliary_uuids,
multiple_beliefs=False,
advance_scene_rollout_period=self.ADVANCE_SCENE_ROLLOUT_PERIOD,
)
def preprocessors(self) -> Sequence[Union[Preprocessor, Builder[Preprocessor]]]:
return self.preprocessing_and_model.preprocessors()
def create_model(self, **kwargs) -> nn.Module:
return self.preprocessing_and_model.create_model(
num_actions=self.ACTION_SPACE.n,
add_prev_actions=self.add_prev_actions,
auxiliary_uuids=self.auxiliary_uuids,
**kwargs,
)
def tag(self):
return (
f"{super(ObjectNavHabitatRGBClipResNet50GRUDDPPOExperimentConfig, self).tag()}"
f"-RGB-ClipResNet50GRU-DDPPO-lr{self.lr}"
)
|
allenact-main
|
projects/objectnav_baselines/experiments/habitat/clip/objectnav_habitat_rgb_clipresnet50gru_ddppo.py
|
from typing import Sequence, Union, Type, Tuple, Optional, Dict, Any
import attr
import gym
import numpy as np
import torch
import torch.nn as nn
from allenact.base_abstractions.distributions import CategoricalDistr
from allenact.base_abstractions.misc import (
ObservationType,
Memory,
ActorCriticOutput,
DistributionType,
)
from allenact.base_abstractions.preprocessor import Preprocessor
from allenact.base_abstractions.sensor import Sensor
from allenact.embodiedai.sensors.vision_sensors import RGBSensor, DepthSensor
from allenact.utils.experiment_utils import Builder
from allenact.utils.misc_utils import prepare_locals_for_super
from allenact_plugins.clip_plugin.clip_preprocessors import ClipResNetPreprocessor
from allenact_plugins.navigation_plugin.objectnav.models import (
ResnetTensorNavActorCritic,
)
class LookDownFirstResnetTensorNavActorCritic(ResnetTensorNavActorCritic):
def __init__(self, look_down_action_index: int, **kwargs):
super().__init__(**kwargs)
self.look_down_action_index = look_down_action_index
self.register_buffer(
"look_down_delta", torch.zeros(1, 1, self.action_space.n), persistent=False
)
self.look_down_delta[0, 0, self.look_down_action_index] = 99999
def forward( # type:ignore
self,
observations: ObservationType,
memory: Memory,
prev_actions: torch.Tensor,
masks: torch.FloatTensor,
) -> Tuple[ActorCriticOutput[DistributionType], Optional[Memory]]:
ac_out, memory = super(LookDownFirstResnetTensorNavActorCritic, self).forward(
**prepare_locals_for_super(locals())
)
logits = ac_out.distributions.logits * masks + self.look_down_delta * (
1 - masks
)
ac_out = ActorCriticOutput(
distributions=CategoricalDistr(logits=logits),
values=ac_out.values,
extras=ac_out.extras,
)
return ac_out, memory
@attr.s(kw_only=True)
class ClipResNetPreprocessGRUActorCriticMixin:
sensors: Sequence[Sensor] = attr.ib()
clip_model_type: str = attr.ib()
screen_size: int = attr.ib()
goal_sensor_type: Type[Optional[Sensor]] = attr.ib()
pool: bool = attr.ib(default=False)
def preprocessors(self) -> Sequence[Union[Preprocessor, Builder[Preprocessor]]]:
preprocessors = []
rgb_sensor = next((s for s in self.sensors if isinstance(s, RGBSensor)), None)
assert (
np.linalg.norm(
np.array(rgb_sensor._norm_means)
- np.array(ClipResNetPreprocessor.CLIP_RGB_MEANS)
)
< 1e-5
)
assert (
np.linalg.norm(
np.array(rgb_sensor._norm_sds)
- np.array(ClipResNetPreprocessor.CLIP_RGB_STDS)
)
< 1e-5
)
if rgb_sensor is not None:
preprocessors.append(
ClipResNetPreprocessor(
rgb_input_uuid=rgb_sensor.uuid,
clip_model_type=self.clip_model_type,
pool=self.pool,
output_uuid="rgb_clip_resnet",
input_img_height_width=(rgb_sensor.height, rgb_sensor.width),
)
)
depth_sensor = next(
(s for s in self.sensors if isinstance(s, DepthSensor)), None
)
if depth_sensor is not None:
preprocessors.append(
ClipResNetPreprocessor(
rgb_input_uuid=depth_sensor.uuid,
clip_model_type=self.clip_model_type,
pool=self.pool,
output_uuid="depth_clip_resnet",
input_img_height_width=(depth_sensor.height, depth_sensor.width),
)
)
return preprocessors
def create_model(
self,
num_actions: int,
add_prev_actions: bool,
look_down_first: bool = False,
look_down_action_index: Optional[int] = None,
hidden_size: int = 512,
rnn_type="GRU",
model_kwargs: Optional[Dict[str, Any]] = None,
**kwargs
) -> nn.Module:
has_rgb = any(isinstance(s, RGBSensor) for s in self.sensors)
has_depth = any(isinstance(s, DepthSensor) for s in self.sensors)
goal_sensor_uuid = next(
(s.uuid for s in self.sensors if isinstance(s, self.goal_sensor_type)),
None,
)
if model_kwargs is None:
model_kwargs = {}
model_kwargs = dict(
action_space=gym.spaces.Discrete(num_actions),
observation_space=kwargs["sensor_preprocessor_graph"].observation_spaces,
goal_sensor_uuid=goal_sensor_uuid,
rgb_resnet_preprocessor_uuid="rgb_clip_resnet" if has_rgb else None,
depth_resnet_preprocessor_uuid="depth_clip_resnet" if has_depth else None,
hidden_size=hidden_size,
goal_dims=32,
add_prev_actions=add_prev_actions,
rnn_type=rnn_type,
**model_kwargs
)
if not look_down_first:
return ResnetTensorNavActorCritic(**model_kwargs)
else:
return LookDownFirstResnetTensorNavActorCritic(
look_down_action_index=look_down_action_index, **model_kwargs
)
|
allenact-main
|
projects/objectnav_baselines/experiments/clip/mixins.py
|
allenact-main
|
projects/objectnav_baselines/experiments/clip/__init__.py
|
|
from typing import Sequence, Union
import torch.nn as nn
from allenact.base_abstractions.preprocessor import Preprocessor
from allenact.utils.experiment_utils import Builder, TrainingPipeline
from allenact_plugins.ithor_plugin.ithor_sensors import GoalObjectTypeThorSensor
from allenact_plugins.robothor_plugin.robothor_sensors import DepthSensorThor
from projects.objectnav_baselines.experiments.ithor.objectnav_ithor_base import (
ObjectNaviThorBaseConfig,
)
from projects.objectnav_baselines.mixins import (
ResNetPreprocessGRUActorCriticMixin,
ObjectNavPPOMixin,
)
class ObjectNaviThorDepthPPOExperimentConfig(ObjectNaviThorBaseConfig):
"""An Object Navigation experiment configuration in iThor with Depth
input."""
SENSORS = (
DepthSensorThor(
height=ObjectNaviThorBaseConfig.SCREEN_SIZE,
width=ObjectNaviThorBaseConfig.SCREEN_SIZE,
use_normalization=True,
uuid="depth_lowres",
),
GoalObjectTypeThorSensor(object_types=ObjectNaviThorBaseConfig.TARGET_TYPES,),
)
def __init__(self, **kwargs):
super().__init__(**kwargs)
self.preprocessing_and_model = ResNetPreprocessGRUActorCriticMixin(
sensors=self.SENSORS,
resnet_type="RN18",
screen_size=self.SCREEN_SIZE,
goal_sensor_type=GoalObjectTypeThorSensor,
)
def training_pipeline(self, **kwargs) -> TrainingPipeline:
return ObjectNavPPOMixin.training_pipeline(
auxiliary_uuids=[],
multiple_beliefs=False,
advance_scene_rollout_period=self.ADVANCE_SCENE_ROLLOUT_PERIOD,
)
def preprocessors(self) -> Sequence[Union[Preprocessor, Builder[Preprocessor]]]:
return self.preprocessing_and_model.preprocessors()
def create_model(self, **kwargs) -> nn.Module:
return self.preprocessing_and_model.create_model(
num_actions=self.ACTION_SPACE.n, **kwargs
)
def tag(self):
return "ObjectNav-iTHOR-Depth-ResNet18GRU-DDPPO"
|
allenact-main
|
projects/objectnav_baselines/experiments/ithor/objectnav_ithor_depth_resnet18gru_ddppo.py
|
allenact-main
|
projects/objectnav_baselines/experiments/ithor/__init__.py
|
|
from typing import Sequence, Union
import torch.nn as nn
from allenact.base_abstractions.preprocessor import Preprocessor
from allenact.utils.experiment_utils import Builder, TrainingPipeline
from allenact_plugins.ithor_plugin.ithor_sensors import (
RGBSensorThor,
GoalObjectTypeThorSensor,
)
from allenact_plugins.robothor_plugin.robothor_sensors import DepthSensorThor
from projects.objectnav_baselines.experiments.ithor.objectnav_ithor_base import (
ObjectNaviThorBaseConfig,
)
from projects.objectnav_baselines.mixins import (
ResNetPreprocessGRUActorCriticMixin,
ObjectNavPPOMixin,
)
class ObjectNaviThorRGBDPPOExperimentConfig(ObjectNaviThorBaseConfig):
"""An Object Navigation experiment configuration in iTHOR with RGBD
input."""
SENSORS = [
RGBSensorThor(
height=ObjectNaviThorBaseConfig.SCREEN_SIZE,
width=ObjectNaviThorBaseConfig.SCREEN_SIZE,
use_resnet_normalization=True,
uuid="rgb_lowres",
),
DepthSensorThor(
height=ObjectNaviThorBaseConfig.SCREEN_SIZE,
width=ObjectNaviThorBaseConfig.SCREEN_SIZE,
use_normalization=True,
uuid="depth_lowres",
),
GoalObjectTypeThorSensor(object_types=ObjectNaviThorBaseConfig.TARGET_TYPES,),
]
def __init__(self, **kwargs):
super().__init__(**kwargs)
self.preprocessing_and_model = ResNetPreprocessGRUActorCriticMixin(
sensors=self.SENSORS,
resnet_type="RN18",
screen_size=self.SCREEN_SIZE,
goal_sensor_type=GoalObjectTypeThorSensor,
)
def training_pipeline(self, **kwargs) -> TrainingPipeline:
return ObjectNavPPOMixin.training_pipeline(
auxiliary_uuids=[],
multiple_beliefs=False,
advance_scene_rollout_period=self.ADVANCE_SCENE_ROLLOUT_PERIOD,
)
def preprocessors(self) -> Sequence[Union[Preprocessor, Builder[Preprocessor]]]:
return self.preprocessing_and_model.preprocessors()
def create_model(self, **kwargs) -> nn.Module:
return self.preprocessing_and_model.create_model(
num_actions=self.ACTION_SPACE.n, **kwargs
)
def tag(self):
return "ObjectNav-iTHOR-RGBD-ResNet18GRU-DDPPO"
|
allenact-main
|
projects/objectnav_baselines/experiments/ithor/objectnav_ithor_rgbd_resnet18gru_ddppo.py
|
from typing import Sequence, Union
import torch.nn as nn
from allenact.base_abstractions.preprocessor import Preprocessor
from allenact.utils.experiment_utils import Builder, TrainingPipeline
from allenact_plugins.ithor_plugin.ithor_sensors import (
GoalObjectTypeThorSensor,
RGBSensorThor,
)
from projects.objectnav_baselines.experiments.ithor.objectnav_ithor_base import (
ObjectNaviThorBaseConfig,
)
from projects.objectnav_baselines.mixins import (
ResNetPreprocessGRUActorCriticMixin,
ObjectNavPPOMixin,
)
class ObjectNaviThorRGBPPOExperimentConfig(ObjectNaviThorBaseConfig):
"""An Object Navigation experiment configuration in iThor with RGB
input."""
SENSORS = [
RGBSensorThor(
height=ObjectNaviThorBaseConfig.SCREEN_SIZE,
width=ObjectNaviThorBaseConfig.SCREEN_SIZE,
use_resnet_normalization=True,
uuid="rgb_lowres",
),
GoalObjectTypeThorSensor(object_types=ObjectNaviThorBaseConfig.TARGET_TYPES,),
]
def __init__(self, **kwargs):
super().__init__(**kwargs)
self.preprocessing_and_model = ResNetPreprocessGRUActorCriticMixin(
sensors=self.SENSORS,
resnet_type="RN18",
screen_size=self.SCREEN_SIZE,
goal_sensor_type=GoalObjectTypeThorSensor,
)
def training_pipeline(self, **kwargs) -> TrainingPipeline:
return ObjectNavPPOMixin.training_pipeline(
auxiliary_uuids=[],
multiple_beliefs=False,
advance_scene_rollout_period=self.ADVANCE_SCENE_ROLLOUT_PERIOD,
)
def preprocessors(self) -> Sequence[Union[Preprocessor, Builder[Preprocessor]]]:
return self.preprocessing_and_model.preprocessors()
def create_model(self, **kwargs) -> nn.Module:
return self.preprocessing_and_model.create_model(
num_actions=self.ACTION_SPACE.n, **kwargs
)
@classmethod
def tag(cls):
return "ObjectNav-iTHOR-RGB-ResNet18GRU-DDPPO"
|
allenact-main
|
projects/objectnav_baselines/experiments/ithor/objectnav_ithor_rgb_resnet18gru_ddppo.py
|
import os
from abc import ABC
import torch
from projects.objectnav_baselines.experiments.objectnav_thor_base import (
ObjectNavThorBaseConfig,
)
class ObjectNaviThorBaseConfig(ObjectNavThorBaseConfig, ABC):
"""The base config for all iTHOR ObjectNav experiments."""
THOR_COMMIT_ID = "9549791ce2e7f472063a10abb1fb7664159fec23"
AGENT_MODE = "default"
DEFAULT_NUM_TRAIN_PROCESSES = 40 if torch.cuda.is_available() else 1
TRAIN_DATASET_DIR = os.path.join(os.getcwd(), "datasets/ithor-objectnav/train")
VAL_DATASET_DIR = os.path.join(os.getcwd(), "datasets/ithor-objectnav/val")
TARGET_TYPES = tuple(
sorted(
[
"AlarmClock",
"Apple",
"Book",
"Bowl",
"Box",
"Candle",
"GarbageCan",
"HousePlant",
"Laptop",
"SoapBottle",
"Television",
"Toaster",
],
)
)
|
allenact-main
|
projects/objectnav_baselines/experiments/ithor/objectnav_ithor_base.py
|
allenact-main
|
projects/babyai_baselines/__init__.py
|
|
allenact-main
|
projects/babyai_baselines/experiments/__init__.py
|
|
from abc import ABC
from typing import Dict, Any, List, Optional, Union, Sequence, cast
import gym
import torch
import torch.nn as nn
import torch.optim as optim
from torch.optim.lr_scheduler import LambdaLR
from allenact.algorithms.onpolicy_sync.losses import PPO, A2C
from allenact.algorithms.onpolicy_sync.losses.a2cacktr import A2CConfig
from allenact.algorithms.onpolicy_sync.losses.imitation import Imitation
from allenact.algorithms.onpolicy_sync.losses.ppo import PPOConfig
from allenact.base_abstractions.experiment_config import ExperimentConfig, MachineParams
from allenact.base_abstractions.misc import Loss
from allenact.base_abstractions.sensor import SensorSuite, Sensor, ExpertActionSensor
from allenact.base_abstractions.task import TaskSampler
from allenact.utils.experiment_utils import (
Builder,
LinearDecay,
PipelineStage,
TrainingPipeline,
)
from allenact_plugins.babyai_plugin.babyai_models import BabyAIRecurrentACModel
from allenact_plugins.babyai_plugin.babyai_tasks import BabyAITask, BabyAITaskSampler
from allenact_plugins.minigrid_plugin.minigrid_sensors import (
EgocentricMiniGridSensor,
MiniGridMissionSensor,
)
class BaseBabyAIExperimentConfig(ExperimentConfig, ABC):
"""Base experimental config."""
LEVEL: Optional[str] = None
TOTAL_RL_TRAIN_STEPS: Optional[int] = None
AGENT_VIEW_SIZE: int = 7
ROLLOUT_STEPS: Optional[int] = None
NUM_TRAIN_SAMPLERS: Optional[int] = None
NUM_TEST_TASKS: Optional[int] = None
INSTR_LEN: Optional[int] = None
USE_INSTR: Optional[bool] = None
GPU_ID: Optional[int] = None
USE_EXPERT = False
SHOULD_LOG = True
PPO_NUM_MINI_BATCH = 2
ARCH: Optional[str] = None
NUM_CKPTS_TO_SAVE = 50
TEST_SEED_OFFSET = 0
DEFAULT_LR = 1e-3
@classmethod
def METRIC_ACCUMULATE_INTERVAL(cls):
return cls.NUM_TRAIN_SAMPLERS * 1000
@classmethod
def get_sensors(cls) -> Sequence[Sensor]:
assert cls.USE_INSTR is not None
return (
[
EgocentricMiniGridSensor(
agent_view_size=cls.AGENT_VIEW_SIZE, view_channels=3
),
]
+ (
[MiniGridMissionSensor(instr_len=cls.INSTR_LEN)] # type:ignore
if cls.USE_INSTR
else []
)
+ (
[
ExpertActionSensor( # type: ignore
nactions=len(BabyAITask.class_action_names())
)
]
if cls.USE_EXPERT
else []
)
)
@classmethod
def rl_loss_default(cls, alg: str, steps: Optional[int] = None):
if alg == "ppo":
assert steps is not None
return {
"loss": Builder(
PPO, kwargs={"clip_decay": LinearDecay(steps)}, default=PPOConfig,
),
"num_mini_batch": cls.PPO_NUM_MINI_BATCH,
"update_repeats": 4,
}
elif alg == "a2c":
return {
"loss": A2C(**A2CConfig),
"num_mini_batch": 1,
"update_repeats": 1,
}
elif alg == "imitation":
return {
"loss": Imitation(),
"num_mini_batch": cls.PPO_NUM_MINI_BATCH,
"update_repeats": 4,
}
else:
raise NotImplementedError
@classmethod
def _training_pipeline(
cls,
named_losses: Dict[str, Union[Loss, Builder]],
pipeline_stages: List[PipelineStage],
num_mini_batch: int,
update_repeats: int,
total_train_steps: int,
lr: Optional[float] = None,
):
lr = cls.DEFAULT_LR if lr is None else lr
num_steps = cls.ROLLOUT_STEPS
metric_accumulate_interval = (
cls.METRIC_ACCUMULATE_INTERVAL()
) # Log every 10 max length tasks
save_interval = int(cls.TOTAL_RL_TRAIN_STEPS / cls.NUM_CKPTS_TO_SAVE)
gamma = 0.99
use_gae = "reinforce_loss" not in named_losses
gae_lambda = 0.99
max_grad_norm = 0.5
return TrainingPipeline(
save_interval=save_interval,
metric_accumulate_interval=metric_accumulate_interval,
optimizer_builder=Builder(cast(optim.Optimizer, optim.Adam), dict(lr=lr)),
num_mini_batch=num_mini_batch,
update_repeats=update_repeats,
max_grad_norm=max_grad_norm,
num_steps=num_steps,
named_losses=named_losses,
gamma=gamma,
use_gae=use_gae,
gae_lambda=gae_lambda,
advance_scene_rollout_period=None,
should_log=cls.SHOULD_LOG,
pipeline_stages=pipeline_stages,
lr_scheduler_builder=Builder(
LambdaLR, {"lr_lambda": LinearDecay(steps=cls.TOTAL_RL_TRAIN_STEPS)} # type: ignore
),
)
@classmethod
def machine_params(
cls, mode="train", gpu_id="default", n_train_processes="default", **kwargs
):
if mode == "train":
if n_train_processes == "default":
nprocesses = cls.NUM_TRAIN_SAMPLERS
else:
nprocesses = n_train_processes
elif mode == "valid":
nprocesses = 0
elif mode == "test":
nprocesses = min(
100 if torch.cuda.is_available() else 8, cls.NUM_TEST_TASKS
)
else:
raise NotImplementedError("mode must be 'train', 'valid', or 'test'.")
if gpu_id == "default":
devices = [] if cls.GPU_ID is None else [cls.GPU_ID]
else:
devices = [gpu_id]
return MachineParams(nprocesses=nprocesses, devices=devices)
@classmethod
def create_model(cls, **kwargs) -> nn.Module:
sensors = cls.get_sensors()
return BabyAIRecurrentACModel(
action_space=gym.spaces.Discrete(len(BabyAITask.class_action_names())),
observation_space=SensorSuite(sensors).observation_spaces,
use_instr=cls.USE_INSTR,
use_memory=True,
arch=cls.ARCH,
)
@classmethod
def make_sampler_fn(cls, **kwargs) -> TaskSampler:
return BabyAITaskSampler(**kwargs)
def train_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
return {
"env_builder": self.LEVEL,
"sensors": self.get_sensors(),
"seed": seeds[process_ind] if seeds is not None else None,
}
def valid_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
raise RuntimeError
def test_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
max_tasks = self.NUM_TEST_TASKS // total_processes + (
process_ind < (self.NUM_TEST_TASKS % total_processes)
)
task_seeds_list = [
2 ** 31 - 1 + self.TEST_SEED_OFFSET + process_ind + total_processes * i
for i in range(max_tasks)
]
# print(max_tasks, process_ind, total_processes, task_seeds_list)
assert len(task_seeds_list) == 0 or (
min(task_seeds_list) >= 0 and max(task_seeds_list) <= 2 ** 32 - 1
)
train_sampler_args = self.train_task_sampler_args(
process_ind=process_ind,
total_processes=total_processes,
devices=devices,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
)
return {
**train_sampler_args,
"task_seeds_list": task_seeds_list,
"max_tasks": max_tasks,
"deterministic_sampling": True,
"sensors": [
s for s in train_sampler_args["sensors"] if "Expert" not in str(type(s))
],
}
|
allenact-main
|
projects/babyai_baselines/experiments/base.py
|
from allenact.utils.experiment_utils import PipelineStage
from projects.babyai_baselines.experiments.go_to_local.base import (
BaseBabyAIGoToLocalExperimentConfig,
)
class PPOBabyAIGoToLocalExperimentConfig(BaseBabyAIGoToLocalExperimentConfig):
"""Behavior clone then PPO."""
USE_EXPERT = True
@classmethod
def tag(cls):
return "BabyAIGoToLocalBC"
@classmethod
def training_pipeline(cls, **kwargs):
total_train_steps = cls.TOTAL_IL_TRAIN_STEPS
ppo_info = cls.rl_loss_default("ppo", steps=-1)
imitation_info = cls.rl_loss_default("imitation")
return cls._training_pipeline(
named_losses={"imitation_loss": imitation_info["loss"],},
pipeline_stages=[
PipelineStage(
loss_names=["imitation_loss"], max_stage_steps=total_train_steps,
),
],
num_mini_batch=min(
info["num_mini_batch"] for info in [ppo_info, imitation_info]
),
update_repeats=min(
info["update_repeats"] for info in [ppo_info, imitation_info]
),
total_train_steps=total_train_steps,
)
|
allenact-main
|
projects/babyai_baselines/experiments/go_to_local/bc.py
|
import os
from typing import Optional
from typing import Sequence
import torch
from allenact.algorithms.onpolicy_sync.storage import RolloutBlockStorage
from allenact.utils.experiment_utils import (
PipelineStage,
StageComponent,
TrainingSettings,
)
from allenact_plugins.babyai_plugin.babyai_constants import (
BABYAI_EXPERT_TRAJECTORIES_DIR,
)
from allenact_plugins.minigrid_plugin.minigrid_offpolicy import (
MiniGridOffPolicyExpertCELoss,
MiniGridExpertTrajectoryStorage,
)
from projects.tutorials.minigrid_offpolicy_tutorial import (
BCOffPolicyBabyAIGoToLocalExperimentConfig,
)
class DistributedBCOffPolicyBabyAIGoToLocalExperimentConfig(
BCOffPolicyBabyAIGoToLocalExperimentConfig
):
"""Distributed Off policy imitation."""
@classmethod
def tag(cls):
return "DistributedBabyAIGoToLocalBCOffPolicy"
@classmethod
def machine_params(
cls, mode="train", gpu_id="default", n_train_processes="default", **kwargs
):
res = super().machine_params(mode, gpu_id, n_train_processes, **kwargs)
if res["nprocesses"] > 0 and torch.cuda.is_available():
ngpu_to_use = min(torch.cuda.device_count(), 2)
res["nprocesses"] = [res["nprocesses"] // ngpu_to_use] * ngpu_to_use
res["gpu_ids"] = list(range(ngpu_to_use))
return res
@classmethod
def expert_ce_loss_kwargs_generator(
cls, worker_id: int, rollouts_per_worker: Sequence[int], seed: Optional[int]
):
return dict(num_workers=len(rollouts_per_worker), current_worker=worker_id)
@classmethod
def training_pipeline(cls, **kwargs):
total_train_steps = cls.TOTAL_IL_TRAIN_STEPS
ppo_info = cls.rl_loss_default("ppo", steps=-1)
num_mini_batch = ppo_info["num_mini_batch"]
update_repeats = ppo_info["update_repeats"]
return cls._training_pipeline(
named_losses={
"offpolicy_expert_ce_loss": MiniGridOffPolicyExpertCELoss(
total_episodes_in_epoch=int(1e6)
),
},
named_storages={
"onpolicy": RolloutBlockStorage(),
"minigrid_offpolicy_expert": MiniGridExpertTrajectoryStorage(
data_path=os.path.join(
BABYAI_EXPERT_TRAJECTORIES_DIR,
"BabyAI-GoToLocal-v0{}.pkl".format(
"" if torch.cuda.is_available() else "-small"
),
),
num_samplers=cls.NUM_TRAIN_SAMPLERS,
rollout_len=cls.ROLLOUT_STEPS,
instr_len=cls.INSTR_LEN,
),
},
pipeline_stages=[
PipelineStage(
loss_names=["offpolicy_expert_ce_loss"],
max_stage_steps=total_train_steps,
stage_components=[
StageComponent(
uuid="offpolicy",
storage_uuid="minigrid_offpolicy_expert",
loss_names=["offpolicy_expert_ce_loss"],
training_settings=TrainingSettings(
update_repeats=num_mini_batch * update_repeats,
num_mini_batch=1,
),
)
],
),
],
num_mini_batch=0,
update_repeats=0,
total_train_steps=total_train_steps,
)
|
allenact-main
|
projects/babyai_baselines/experiments/go_to_local/distributed_bc_offpolicy.py
|
from allenact.utils.experiment_utils import PipelineStage, LinearDecay
from projects.babyai_baselines.experiments.go_to_local.base import (
BaseBabyAIGoToLocalExperimentConfig,
)
class DaggerBabyAIGoToLocalExperimentConfig(BaseBabyAIGoToLocalExperimentConfig):
"""Find goal in lighthouse env using imitation learning.
Training with Dagger.
"""
USE_EXPERT = True
@classmethod
def tag(cls):
return "BabyAIGoToLocalDagger"
@classmethod
def training_pipeline(cls, **kwargs):
total_train_steps = cls.TOTAL_IL_TRAIN_STEPS
loss_info = cls.rl_loss_default("imitation")
return cls._training_pipeline(
named_losses={"imitation_loss": loss_info["loss"]},
pipeline_stages=[
PipelineStage(
loss_names=["imitation_loss"],
teacher_forcing=LinearDecay(
startp=1.0, endp=0.0, steps=total_train_steps // 2,
),
max_stage_steps=total_train_steps,
)
],
num_mini_batch=loss_info["num_mini_batch"],
update_repeats=loss_info["update_repeats"],
total_train_steps=total_train_steps,
)
|
allenact-main
|
projects/babyai_baselines/experiments/go_to_local/dagger.py
|
allenact-main
|
projects/babyai_baselines/experiments/go_to_local/__init__.py
|
|
import torch
from allenact.utils.experiment_utils import PipelineStage, LinearDecay
from projects.babyai_baselines.experiments.go_to_local.base import (
BaseBabyAIGoToLocalExperimentConfig,
)
class BCTeacherForcingBabyAIGoToLocalExperimentConfig(
BaseBabyAIGoToLocalExperimentConfig
):
"""Behavior clone with teacher forcing."""
USE_EXPERT = True
GPU_ID = 0 if torch.cuda.is_available() else None
@classmethod
def METRIC_ACCUMULATE_INTERVAL(cls):
return 1
@classmethod
def tag(cls):
return "BabyAIGoToLocalBCTeacherForcing"
@classmethod
def training_pipeline(cls, **kwargs):
total_train_steps = cls.TOTAL_IL_TRAIN_STEPS
ppo_info = cls.rl_loss_default("ppo", steps=-1)
imitation_info = cls.rl_loss_default("imitation")
return cls._training_pipeline(
named_losses={"imitation_loss": imitation_info["loss"],},
pipeline_stages=[
PipelineStage(
loss_names=["imitation_loss"],
teacher_forcing=LinearDecay(
startp=1.0, endp=1.0, steps=total_train_steps,
),
max_stage_steps=total_train_steps,
),
],
num_mini_batch=min(
info["num_mini_batch"] for info in [ppo_info, imitation_info]
),
update_repeats=min(
info["update_repeats"] for info in [ppo_info, imitation_info]
),
total_train_steps=total_train_steps,
)
|
allenact-main
|
projects/babyai_baselines/experiments/go_to_local/bc_teacher_forcing.py
|
import torch
from .bc_teacher_forcing import BCTeacherForcingBabyAIGoToLocalExperimentConfig
class DistributedBCTeacherForcingBabyAIGoToLocalExperimentConfig(
BCTeacherForcingBabyAIGoToLocalExperimentConfig
):
"""Distributed behavior clone with teacher forcing."""
USE_EXPERT = True
GPU_ID = 0 if torch.cuda.is_available() else None
@classmethod
def METRIC_ACCUMULATE_INTERVAL(cls):
return 1
@classmethod
def tag(cls):
return "BabyAIGoToLocalBCTeacherForcingDistributed"
@classmethod
def machine_params(
cls, mode="train", gpu_id="default", n_train_processes="default", **kwargs
):
res = super().machine_params(mode, gpu_id, n_train_processes, **kwargs)
if res["nprocesses"] > 0 and torch.cuda.is_available():
ngpu_to_use = min(torch.cuda.device_count(), 2)
res["nprocesses"] = [res["nprocesses"] // ngpu_to_use] * ngpu_to_use
res["gpu_ids"] = list(range(ngpu_to_use))
return res
|
allenact-main
|
projects/babyai_baselines/experiments/go_to_local/distributed_bc_teacher_forcing.py
|
import torch
from allenact.utils.experiment_utils import PipelineStage
from projects.babyai_baselines.experiments.go_to_local.base import (
BaseBabyAIGoToLocalExperimentConfig,
)
class PPOBabyAIGoToLocalExperimentConfig(BaseBabyAIGoToLocalExperimentConfig):
"""PPO only."""
NUM_TRAIN_SAMPLERS: int = (
128 * 12
if torch.cuda.is_available()
else BaseBabyAIGoToLocalExperimentConfig.NUM_TRAIN_SAMPLERS
)
ROLLOUT_STEPS: int = 32
USE_LR_DECAY = False
DEFAULT_LR = 1e-4
@classmethod
def tag(cls):
return "BabyAIGoToLocalPPO"
@classmethod
def training_pipeline(cls, **kwargs):
total_train_steps = cls.TOTAL_RL_TRAIN_STEPS
ppo_info = cls.rl_loss_default("ppo", steps=total_train_steps)
return cls._training_pipeline(
named_losses={"ppo_loss": ppo_info["loss"],},
pipeline_stages=[
PipelineStage(
loss_names=["ppo_loss"], max_stage_steps=total_train_steps,
),
],
num_mini_batch=ppo_info["num_mini_batch"],
update_repeats=ppo_info["update_repeats"],
total_train_steps=total_train_steps,
)
|
allenact-main
|
projects/babyai_baselines/experiments/go_to_local/ppo.py
|
import torch
from allenact.utils.experiment_utils import PipelineStage
from projects.babyai_baselines.experiments.go_to_local.base import (
BaseBabyAIGoToLocalExperimentConfig,
)
class A2CBabyAIGoToLocalExperimentConfig(BaseBabyAIGoToLocalExperimentConfig):
"""A2C only."""
NUM_TRAIN_SAMPLERS: int = (
128 * 6
if torch.cuda.is_available()
else BaseBabyAIGoToLocalExperimentConfig.NUM_TRAIN_SAMPLERS
)
ROLLOUT_STEPS: int = 16
USE_LR_DECAY = False
DEFAULT_LR = 1e-4
@classmethod
def tag(cls):
return "BabyAIGoToLocalA2C"
@classmethod
def training_pipeline(cls, **kwargs):
total_training_steps = cls.TOTAL_RL_TRAIN_STEPS
a2c_info = cls.rl_loss_default("a2c", steps=total_training_steps)
return cls._training_pipeline(
named_losses={"a2c_loss": a2c_info["loss"],},
pipeline_stages=[
PipelineStage(
loss_names=["a2c_loss"], max_stage_steps=total_training_steps,
),
],
num_mini_batch=a2c_info["num_mini_batch"],
update_repeats=a2c_info["update_repeats"],
total_train_steps=total_training_steps,
)
|
allenact-main
|
projects/babyai_baselines/experiments/go_to_local/a2c.py
|
from abc import ABC
from typing import Dict, List, Optional, Union, Any, cast
import gym
import torch
import torch.nn as nn
import torch.optim as optim
from torch.optim.lr_scheduler import LambdaLR
from allenact.algorithms.onpolicy_sync.storage import ExperienceStorage
from allenact.base_abstractions.misc import Loss
from allenact.base_abstractions.sensor import SensorSuite
from allenact.utils.experiment_utils import (
Builder,
LinearDecay,
PipelineStage,
TrainingPipeline,
)
from allenact_plugins.babyai_plugin.babyai_models import BabyAIRecurrentACModel
from allenact_plugins.babyai_plugin.babyai_tasks import BabyAITask
from projects.babyai_baselines.experiments.base import BaseBabyAIExperimentConfig
class BaseBabyAIGoToLocalExperimentConfig(BaseBabyAIExperimentConfig, ABC):
"""Base experimental config."""
LEVEL: Optional[str] = "BabyAI-GoToLocal-v0"
TOTAL_RL_TRAIN_STEPS = int(15e6)
TOTAL_IL_TRAIN_STEPS = int(7.5e6)
ROLLOUT_STEPS: int = 128
NUM_TRAIN_SAMPLERS: int = 128 if torch.cuda.is_available() else 4
PPO_NUM_MINI_BATCH = 4
NUM_CKPTS_TO_SAVE = 20
NUM_TEST_TASKS: int = 1000
USE_LR_DECAY: bool = True
# ARCH = "cnn1"
# ARCH = "cnn2"
ARCH = "expert_filmcnn"
USE_INSTR = True
INSTR_LEN: int = 5
INCLUDE_AUXILIARY_HEAD = False
@classmethod
def METRIC_ACCUMULATE_INTERVAL(cls):
return cls.NUM_TRAIN_SAMPLERS * 64
@classmethod
def _training_pipeline( # type:ignore
cls,
named_losses: Dict[str, Union[Loss, Builder]],
pipeline_stages: List[PipelineStage],
num_mini_batch: int,
update_repeats: int,
total_train_steps: int,
lr: Optional[float] = None,
named_storages: Optional[Dict[str, Union[ExperienceStorage, Builder]]] = None,
):
lr = cls.DEFAULT_LR
num_steps = cls.ROLLOUT_STEPS
metric_accumulate_interval = (
cls.METRIC_ACCUMULATE_INTERVAL()
) # Log every 10 max length tasks
save_interval = int(total_train_steps / cls.NUM_CKPTS_TO_SAVE)
gamma = 0.99
use_gae = "reinforce_loss" not in named_losses
gae_lambda = 0.99
max_grad_norm = 0.5
return TrainingPipeline(
save_interval=save_interval,
metric_accumulate_interval=metric_accumulate_interval,
optimizer_builder=Builder(cast(optim.Optimizer, optim.Adam), dict(lr=lr)),
num_mini_batch=num_mini_batch,
update_repeats=update_repeats,
max_grad_norm=max_grad_norm,
num_steps=num_steps,
named_losses=named_losses,
gamma=gamma,
use_gae=use_gae,
gae_lambda=gae_lambda,
advance_scene_rollout_period=None,
should_log=cls.SHOULD_LOG,
pipeline_stages=pipeline_stages,
named_storages=named_storages,
lr_scheduler_builder=Builder(
LambdaLR, {"lr_lambda": LinearDecay(steps=total_train_steps)} # type: ignore
)
if cls.USE_LR_DECAY
else None,
)
@classmethod
def create_model(cls, **kwargs) -> nn.Module:
sensors = cls.get_sensors()
return BabyAIRecurrentACModel(
action_space=gym.spaces.Discrete(len(BabyAITask.class_action_names())),
observation_space=SensorSuite(sensors).observation_spaces,
use_instr=cls.USE_INSTR,
use_memory=True,
arch=cls.ARCH,
instr_dim=256,
lang_model="attgru",
memory_dim=2048,
include_auxiliary_head=cls.INCLUDE_AUXILIARY_HEAD,
)
def valid_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
raise RuntimeError("No validation processes for these tasks")
|
allenact-main
|
projects/babyai_baselines/experiments/go_to_local/base.py
|
from allenact.utils.experiment_utils import PipelineStage
from projects.babyai_baselines.experiments.go_to_obj.base import (
BaseBabyAIGoToObjExperimentConfig,
)
class PPOBabyAIGoToObjExperimentConfig(BaseBabyAIGoToObjExperimentConfig):
"""Behavior clone then PPO."""
USE_EXPERT = True
@classmethod
def tag(cls):
return "BabyAIGoToObjBC"
@classmethod
def training_pipeline(cls, **kwargs):
total_train_steps = cls.TOTAL_IL_TRAIN_STEPS
ppo_info = cls.rl_loss_default("ppo", steps=-1)
imitation_info = cls.rl_loss_default("imitation")
return cls._training_pipeline(
named_losses={"imitation_loss": imitation_info["loss"],},
pipeline_stages=[
PipelineStage(
loss_names=["imitation_loss"], max_stage_steps=total_train_steps,
),
],
num_mini_batch=min(
info["num_mini_batch"] for info in [ppo_info, imitation_info]
),
update_repeats=min(
info["update_repeats"] for info in [ppo_info, imitation_info]
),
total_train_steps=total_train_steps,
)
|
allenact-main
|
projects/babyai_baselines/experiments/go_to_obj/bc.py
|
from allenact.utils.experiment_utils import PipelineStage, LinearDecay
from projects.babyai_baselines.experiments.go_to_obj.base import (
BaseBabyAIGoToObjExperimentConfig,
)
class DaggerBabyAIGoToObjExperimentConfig(BaseBabyAIGoToObjExperimentConfig):
"""Find goal in lighthouse env using imitation learning.
Training with Dagger.
"""
USE_EXPERT = True
@classmethod
def tag(cls):
return "BabyAIGoToObjDagger"
@classmethod
def training_pipeline(cls, **kwargs):
total_train_steps = cls.TOTAL_IL_TRAIN_STEPS
loss_info = cls.rl_loss_default("imitation")
return cls._training_pipeline(
named_losses={"imitation_loss": loss_info["loss"]},
pipeline_stages=[
PipelineStage(
loss_names=["imitation_loss"],
teacher_forcing=LinearDecay(
startp=1.0, endp=0.0, steps=total_train_steps // 2,
),
max_stage_steps=total_train_steps,
)
],
num_mini_batch=loss_info["num_mini_batch"],
update_repeats=loss_info["update_repeats"],
total_train_steps=total_train_steps,
)
|
allenact-main
|
projects/babyai_baselines/experiments/go_to_obj/dagger.py
|
allenact-main
|
projects/babyai_baselines/experiments/go_to_obj/__init__.py
|
|
from allenact.utils.experiment_utils import PipelineStage, LinearDecay
from projects.babyai_baselines.experiments.go_to_obj.base import (
BaseBabyAIGoToObjExperimentConfig,
)
class PPOBabyAIGoToObjExperimentConfig(BaseBabyAIGoToObjExperimentConfig):
"""Behavior clone (with teacher forcing) then PPO."""
USE_EXPERT = True
@classmethod
def tag(cls):
return "BabyAIGoToObjBCTeacherForcing"
@classmethod
def training_pipeline(cls, **kwargs):
total_train_steps = cls.TOTAL_IL_TRAIN_STEPS
ppo_info = cls.rl_loss_default("ppo", steps=-1)
imitation_info = cls.rl_loss_default("imitation")
return cls._training_pipeline(
named_losses={"imitation_loss": imitation_info["loss"],},
pipeline_stages=[
PipelineStage(
loss_names=["imitation_loss"],
teacher_forcing=LinearDecay(
startp=1.0, endp=1.0, steps=total_train_steps,
),
max_stage_steps=total_train_steps,
),
],
num_mini_batch=min(
info["num_mini_batch"] for info in [ppo_info, imitation_info]
),
update_repeats=min(
info["update_repeats"] for info in [ppo_info, imitation_info]
),
total_train_steps=total_train_steps,
)
|
allenact-main
|
projects/babyai_baselines/experiments/go_to_obj/bc_teacher_forcing.py
|
from allenact.utils.experiment_utils import PipelineStage
from projects.babyai_baselines.experiments.go_to_obj.base import (
BaseBabyAIGoToObjExperimentConfig,
)
class PPOBabyAIGoToObjExperimentConfig(BaseBabyAIGoToObjExperimentConfig):
"""PPO only."""
@classmethod
def tag(cls):
return "BabyAIGoToObjPPO"
@classmethod
def training_pipeline(cls, **kwargs):
total_train_steps = cls.TOTAL_RL_TRAIN_STEPS
ppo_info = cls.rl_loss_default("ppo", steps=total_train_steps)
return cls._training_pipeline(
named_losses={"ppo_loss": ppo_info["loss"],},
pipeline_stages=[
PipelineStage(
loss_names=["ppo_loss"], max_stage_steps=total_train_steps,
),
],
num_mini_batch=ppo_info["num_mini_batch"],
update_repeats=ppo_info["update_repeats"],
total_train_steps=total_train_steps,
)
|
allenact-main
|
projects/babyai_baselines/experiments/go_to_obj/ppo.py
|
from allenact.utils.experiment_utils import PipelineStage
from projects.babyai_baselines.experiments.go_to_obj.base import (
BaseBabyAIGoToObjExperimentConfig,
)
class A2CBabyAIGoToObjExperimentConfig(BaseBabyAIGoToObjExperimentConfig):
"""A2C only."""
TOTAL_RL_TRAIN_STEPS = int(1e5)
@classmethod
def tag(cls):
return "BabyAIGoToObjA2C"
@classmethod
def training_pipeline(cls, **kwargs):
total_training_steps = cls.TOTAL_RL_TRAIN_STEPS
a2c_info = cls.rl_loss_default("a2c", steps=total_training_steps)
return cls._training_pipeline(
named_losses={"a2c_loss": a2c_info["loss"],},
pipeline_stages=[
PipelineStage(
loss_names=["a2c_loss"], max_stage_steps=total_training_steps,
),
],
num_mini_batch=a2c_info["num_mini_batch"],
update_repeats=a2c_info["update_repeats"],
total_train_steps=total_training_steps,
)
|
allenact-main
|
projects/babyai_baselines/experiments/go_to_obj/a2c.py
|
from abc import ABC
from typing import Dict, List, Optional, Union, cast
import gym
import torch.nn as nn
import torch.optim as optim
from torch.optim.lr_scheduler import LambdaLR
from allenact.base_abstractions.misc import Loss
from allenact.base_abstractions.sensor import SensorSuite
from allenact.utils.experiment_utils import (
Builder,
LinearDecay,
PipelineStage,
TrainingPipeline,
)
from allenact_plugins.babyai_plugin.babyai_models import BabyAIRecurrentACModel
from allenact_plugins.babyai_plugin.babyai_tasks import BabyAITask
from projects.babyai_baselines.experiments.base import BaseBabyAIExperimentConfig
class BaseBabyAIGoToObjExperimentConfig(BaseBabyAIExperimentConfig, ABC):
"""Base experimental config."""
LEVEL: Optional[str] = "BabyAI-GoToObj-v0"
TOTAL_RL_TRAIN_STEPS = int(5e4)
TOTAL_IL_TRAIN_STEPS = int(2e4)
ROLLOUT_STEPS: int = 32
NUM_TRAIN_SAMPLERS: int = 16
PPO_NUM_MINI_BATCH = 2
NUM_TEST_TASKS: int = 50
USE_LR_DECAY: bool = False
DEFAULT_LR = 1e-3
ARCH = "cnn1"
# ARCH = "cnn2"
# ARCH = "expert_filmcnn"
USE_INSTR = False
INSTR_LEN: int = -1
@classmethod
def METRIC_ACCUMULATE_INTERVAL(cls):
return cls.NUM_TRAIN_SAMPLERS * 128
@classmethod
def _training_pipeline( # type:ignore
cls,
named_losses: Dict[str, Union[Loss, Builder]],
pipeline_stages: List[PipelineStage],
num_mini_batch: int,
update_repeats: int,
total_train_steps: int,
lr: Optional[float] = None,
**kwargs,
):
lr = cls.DEFAULT_LR
num_steps = cls.ROLLOUT_STEPS
metric_accumulate_interval = (
cls.METRIC_ACCUMULATE_INTERVAL()
) # Log every 10 max length tasks
save_interval = 2 ** 31
gamma = 0.99
use_gae = "reinforce_loss" not in named_losses
gae_lambda = 0.99
max_grad_norm = 0.5
return TrainingPipeline(
save_interval=save_interval,
metric_accumulate_interval=metric_accumulate_interval,
optimizer_builder=Builder(cast(optim.Optimizer, optim.Adam), dict(lr=lr)),
num_mini_batch=num_mini_batch,
update_repeats=update_repeats,
max_grad_norm=max_grad_norm,
num_steps=num_steps,
named_losses=named_losses,
gamma=gamma,
use_gae=use_gae,
gae_lambda=gae_lambda,
advance_scene_rollout_period=None,
should_log=cls.SHOULD_LOG,
pipeline_stages=pipeline_stages,
lr_scheduler_builder=Builder(
LambdaLR, {"lr_lambda": LinearDecay(steps=total_train_steps)} # type: ignore
)
if cls.USE_LR_DECAY
else None,
**kwargs,
)
@classmethod
def create_model(cls, **kwargs) -> nn.Module:
sensors = cls.get_sensors()
return BabyAIRecurrentACModel(
action_space=gym.spaces.Discrete(len(BabyAITask.class_action_names())),
observation_space=SensorSuite(sensors).observation_spaces,
use_instr=cls.USE_INSTR,
use_memory=True,
arch=cls.ARCH,
instr_dim=8,
lang_model="gru",
memory_dim=128,
)
|
allenact-main
|
projects/babyai_baselines/experiments/go_to_obj/base.py
|
from typing import Optional
from typing import Sequence
import attr
import gym
import torch
import torch.nn as nn
import torch.optim as optim
from torch.optim.lr_scheduler import LambdaLR
from allenact.algorithms.onpolicy_sync.losses import PPO
from allenact.algorithms.onpolicy_sync.losses.ppo import PPOConfig
from allenact.base_abstractions.sensor import Sensor
from allenact.embodiedai.sensors.vision_sensors import RGBSensor, DepthSensor
from allenact.utils.experiment_utils import (
Builder,
TrainingPipeline,
PipelineStage,
LinearDecay,
)
from projects.objectnav_baselines.mixins import update_with_auxiliary_losses
# fmt: off
try:
# Habitat may not be installed, just create a fake class here in that case
from allenact_plugins.habitat_plugin.habitat_sensors import TargetCoordinatesSensorHabitat
except ImportError:
class TargetCoordinatesSensorHabitat: #type:ignore
pass
# fmt: on
from allenact_plugins.robothor_plugin.robothor_sensors import GPSCompassSensorRoboThor
from allenact_plugins.robothor_plugin.robothor_tasks import PointNavTask
from allenact_plugins.navigation_plugin.pointnav.models import PointNavActorCritic
@attr.s(kw_only=True)
class PointNavUnfrozenResNetWithGRUActorCriticMixin:
backbone: str = attr.ib()
sensors: Sequence[Sensor] = attr.ib()
auxiliary_uuids: Sequence[str] = attr.ib()
add_prev_actions: bool = attr.ib()
multiple_beliefs: bool = attr.ib()
belief_fusion: Optional[str] = attr.ib()
def create_model(self, **kwargs) -> nn.Module:
rgb_uuid = next(
(s.uuid for s in self.sensors if isinstance(s, RGBSensor)), None
)
depth_uuid = next(
(s.uuid for s in self.sensors if isinstance(s, DepthSensor)), None
)
goal_sensor_uuid = next(
(
s.uuid
for s in self.sensors
if isinstance(
s, (GPSCompassSensorRoboThor, TargetCoordinatesSensorHabitat)
)
)
)
return PointNavActorCritic(
# Env and Tak
action_space=gym.spaces.Discrete(len(PointNavTask.class_action_names())),
observation_space=kwargs["sensor_preprocessor_graph"].observation_spaces,
rgb_uuid=rgb_uuid,
depth_uuid=depth_uuid,
goal_sensor_uuid=goal_sensor_uuid,
# RNN
hidden_size=228
if self.multiple_beliefs and len(self.auxiliary_uuids) > 1
else 512,
num_rnn_layers=1,
rnn_type="GRU",
add_prev_actions=self.add_prev_actions,
action_embed_size=4,
# CNN
backbone=self.backbone,
resnet_baseplanes=32,
embed_coordinates=False,
coordinate_dims=2,
# Aux
auxiliary_uuids=self.auxiliary_uuids,
multiple_beliefs=self.multiple_beliefs,
beliefs_fusion=self.belief_fusion,
)
class PointNavPPOMixin:
@staticmethod
def training_pipeline(
auxiliary_uuids: Sequence[str],
multiple_beliefs: bool,
normalize_advantage: bool,
advance_scene_rollout_period: Optional[int] = None,
) -> TrainingPipeline:
ppo_steps = int(75000000)
lr = 3e-4
num_mini_batch = 1
update_repeats = 4
num_steps = 128
save_interval = 5000000
log_interval = 10000 if torch.cuda.is_available() else 1
gamma = 0.99
use_gae = True
gae_lambda = 0.95
max_grad_norm = 0.5
named_losses = {
"ppo_loss": (PPO(**PPOConfig, normalize_advantage=normalize_advantage), 1.0)
}
named_losses = update_with_auxiliary_losses(
named_losses=named_losses,
auxiliary_uuids=auxiliary_uuids,
multiple_beliefs=multiple_beliefs,
)
return TrainingPipeline(
save_interval=save_interval,
metric_accumulate_interval=log_interval,
optimizer_builder=Builder(optim.Adam, dict(lr=lr)),
num_mini_batch=num_mini_batch,
update_repeats=update_repeats,
max_grad_norm=max_grad_norm,
num_steps=num_steps,
named_losses={key: val[0] for key, val in named_losses.items()},
gamma=gamma,
use_gae=use_gae,
gae_lambda=gae_lambda,
advance_scene_rollout_period=advance_scene_rollout_period,
pipeline_stages=[
PipelineStage(
loss_names=list(named_losses.keys()),
max_stage_steps=ppo_steps,
loss_weights=[val[1] for val in named_losses.values()],
)
],
lr_scheduler_builder=Builder(
LambdaLR, {"lr_lambda": LinearDecay(steps=ppo_steps)}
),
)
|
allenact-main
|
projects/pointnav_baselines/mixins.py
|
allenact-main
|
projects/pointnav_baselines/__init__.py
|
|
from abc import ABC
from typing import Optional, Sequence
from allenact.base_abstractions.experiment_config import ExperimentConfig
from allenact.base_abstractions.sensor import Sensor
class PointNavBaseConfig(ExperimentConfig, ABC):
"""An Object Navigation experiment configuration in iThor."""
ADVANCE_SCENE_ROLLOUT_PERIOD: Optional[int] = None
SENSORS: Optional[Sequence[Sensor]] = None
STEP_SIZE = 0.25
ROTATION_DEGREES = 30.0
DISTANCE_TO_GOAL = 0.2
STOCHASTIC = True
CAMERA_WIDTH = 400
CAMERA_HEIGHT = 300
SCREEN_SIZE = 224
MAX_STEPS = 500
def __init__(self):
self.REWARD_CONFIG = {
"step_penalty": -0.01,
"goal_success_reward": 10.0,
"failed_stop_reward": 0.0,
"reached_max_steps_reward": 0.0,
"shaping_weight": 1.0,
}
|
allenact-main
|
projects/pointnav_baselines/experiments/pointnav_base.py
|
allenact-main
|
projects/pointnav_baselines/experiments/__init__.py
|
|
import glob
import os
import platform
from abc import ABC
from math import ceil
from typing import Dict, Any, List, Optional, Sequence
import ai2thor
import gym
import numpy as np
import torch
from packaging import version
from allenact.base_abstractions.experiment_config import MachineParams
from allenact.base_abstractions.preprocessor import SensorPreprocessorGraph
from allenact.base_abstractions.sensor import SensorSuite, ExpertActionSensor
from allenact.base_abstractions.task import TaskSampler
from allenact.utils.experiment_utils import evenly_distribute_count_into_bins
from allenact.utils.system import get_logger
from allenact_plugins.ithor_plugin.ithor_util import get_open_x_displays
from allenact_plugins.robothor_plugin.robothor_sensors import DepthSensorThor
from allenact_plugins.robothor_plugin.robothor_task_samplers import (
PointNavDatasetTaskSampler,
)
from allenact_plugins.robothor_plugin.robothor_tasks import PointNavTask
from projects.pointnav_baselines.experiments.pointnav_base import PointNavBaseConfig
if ai2thor.__version__ not in ["0.0.1", None] and version.parse(
ai2thor.__version__
) < version.parse("2.7.2"):
raise ImportError(
"To run the PointNav baseline experiments you must use"
" ai2thor version 2.7.1 or higher."
)
class PointNavThorBaseConfig(PointNavBaseConfig, ABC):
"""The base config for all iTHOR PointNav experiments."""
NUM_PROCESSES: Optional[int] = None
TRAIN_GPU_IDS = list(range(torch.cuda.device_count()))
VALID_GPU_IDS = [torch.cuda.device_count() - 1]
TEST_GPU_IDS = [torch.cuda.device_count() - 1]
TRAIN_DATASET_DIR: Optional[str] = None
VAL_DATASET_DIR: Optional[str] = None
TARGET_TYPES: Optional[Sequence[str]] = None
ACTION_SPACE = gym.spaces.Discrete(len(PointNavTask.class_action_names()))
def __init__(self):
super().__init__()
self.ENV_ARGS = dict(
width=self.CAMERA_WIDTH,
height=self.CAMERA_HEIGHT,
continuousMode=True,
applyActionNoise=self.STOCHASTIC,
rotateStepDegrees=self.ROTATION_DEGREES,
gridSize=self.STEP_SIZE,
snapToGrid=False,
agentMode="bot",
include_private_scenes=False,
renderDepthImage=any(isinstance(s, DepthSensorThor) for s in self.SENSORS),
)
def preprocessors(self):
return tuple()
def machine_params(self, mode="train", **kwargs):
sampler_devices: Sequence[int] = []
if mode == "train":
workers_per_device = 1
gpu_ids = (
[]
if not torch.cuda.is_available()
else self.TRAIN_GPU_IDS * workers_per_device
)
nprocesses = (
1
if not torch.cuda.is_available()
else evenly_distribute_count_into_bins(self.NUM_PROCESSES, len(gpu_ids))
)
sampler_devices = self.TRAIN_GPU_IDS
elif mode == "valid":
nprocesses = 1 if torch.cuda.is_available() else 0
gpu_ids = [] if not torch.cuda.is_available() else self.VALID_GPU_IDS
elif mode == "test":
nprocesses = 10
gpu_ids = [] if not torch.cuda.is_available() else self.TEST_GPU_IDS
else:
raise NotImplementedError("mode must be 'train', 'valid', or 'test'.")
sensor_preprocessor_graph = (
SensorPreprocessorGraph(
source_observation_spaces=SensorSuite(self.SENSORS).observation_spaces,
preprocessors=self.preprocessors(),
)
if mode == "train"
or (
(isinstance(nprocesses, int) and nprocesses > 0)
or (isinstance(nprocesses, Sequence) and sum(nprocesses) > 0)
)
else None
)
return MachineParams(
nprocesses=nprocesses,
devices=gpu_ids,
sampler_devices=sampler_devices
if mode == "train"
else gpu_ids, # ignored with > 1 gpu_ids
sensor_preprocessor_graph=sensor_preprocessor_graph,
)
@classmethod
def make_sampler_fn(cls, **kwargs) -> TaskSampler:
return PointNavDatasetTaskSampler(**kwargs)
@staticmethod
def _partition_inds(n: int, num_parts: int):
return np.round(np.linspace(0, n, num_parts + 1, endpoint=True)).astype(
np.int32
)
def _get_sampler_args_for_scene_split(
self,
scenes_dir: str,
process_ind: int,
total_processes: int,
devices: Optional[List[int]],
seeds: Optional[List[int]],
deterministic_cudnn: bool,
include_expert_sensor: bool = True,
) -> Dict[str, Any]:
path = os.path.join(scenes_dir, "*.json.gz")
scenes = [scene.split("/")[-1].split(".")[0] for scene in glob.glob(path)]
if len(scenes) == 0:
raise RuntimeError(
(
"Could find no scene dataset information in directory {}."
" Are you sure you've downloaded them? "
" If not, see https://allenact.org/installation/download-datasets/ information"
" on how this can be done."
).format(scenes_dir)
)
oversample_warning = (
f"Warning: oversampling some of the scenes ({scenes}) to feed all processes ({total_processes})."
" You can avoid this by setting a number of workers divisible by the number of scenes"
)
if total_processes > len(scenes): # oversample some scenes -> bias
if total_processes % len(scenes) != 0:
get_logger().warning(oversample_warning)
scenes = scenes * int(ceil(total_processes / len(scenes)))
scenes = scenes[: total_processes * (len(scenes) // total_processes)]
elif len(scenes) % total_processes != 0:
get_logger().warning(oversample_warning)
inds = self._partition_inds(len(scenes), total_processes)
x_display: Optional[str] = None
if platform.system() == "Linux":
x_displays = get_open_x_displays(throw_error_if_empty=True)
if len([d for d in devices if d != torch.device("cpu")]) > len(x_displays):
get_logger().warning(
f"More GPU devices found than X-displays (devices: `{x_displays}`, x_displays: `{x_displays}`)."
f" This is not necessarily a bad thing but may mean that you're not using GPU memory as"
f" efficiently as possible. Consider following the instructions here:"
f" https://allenact.org/installation/installation-framework/#installation-of-ithor-ithor-plugin"
f" describing how to start an X-display on every GPU."
)
x_display = x_displays[process_ind % len(x_displays)]
return {
"scenes": scenes[inds[process_ind] : inds[process_ind + 1]],
"object_types": self.TARGET_TYPES,
"max_steps": self.MAX_STEPS,
"sensors": [
s
for s in self.SENSORS
if (include_expert_sensor or not isinstance(s, ExpertActionSensor))
],
"action_space": self.ACTION_SPACE,
"seed": seeds[process_ind] if seeds is not None else None,
"deterministic_cudnn": deterministic_cudnn,
"rewards_config": self.REWARD_CONFIG,
"env_args": {**self.ENV_ARGS, "x_display": x_display,},
}
def train_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
res = self._get_sampler_args_for_scene_split(
os.path.join(self.TRAIN_DATASET_DIR, "episodes"),
process_ind,
total_processes,
devices=devices,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
)
res["scene_directory"] = self.TRAIN_DATASET_DIR
res["loop_dataset"] = True
res["allow_flipping"] = True
return res
def valid_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
res = self._get_sampler_args_for_scene_split(
os.path.join(self.VAL_DATASET_DIR, "episodes"),
process_ind,
total_processes,
devices=devices,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
include_expert_sensor=False,
)
res["scene_directory"] = self.VAL_DATASET_DIR
res["loop_dataset"] = False
return res
def test_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
return self.valid_task_sampler_args(
process_ind=process_ind,
total_processes=total_processes,
devices=devices,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
)
|
allenact-main
|
projects/pointnav_baselines/experiments/pointnav_thor_base.py
|
from allenact.utils.experiment_utils import TrainingPipeline
from allenact_plugins.ithor_plugin.ithor_sensors import RGBSensorThor
from allenact_plugins.robothor_plugin.robothor_sensors import DepthSensorThor
from allenact_plugins.robothor_plugin.robothor_sensors import GPSCompassSensorRoboThor
from projects.pointnav_baselines.mixins import (
PointNavUnfrozenResNetWithGRUActorCriticMixin,
)
from projects.pointnav_baselines.experiments.robothor.pointnav_robothor_base import (
PointNavRoboThorBaseConfig,
)
from projects.pointnav_baselines.mixins import PointNavPPOMixin
class PointNavRoboThorRGBPPOExperimentConfig(PointNavRoboThorBaseConfig,):
"""An Point Navigation experiment configuration in RoboThor with RGBD
input."""
SENSORS = [
RGBSensorThor(
height=PointNavRoboThorBaseConfig.SCREEN_SIZE,
width=PointNavRoboThorBaseConfig.SCREEN_SIZE,
use_resnet_normalization=True,
uuid="rgb_lowres",
),
DepthSensorThor(
height=PointNavRoboThorBaseConfig.SCREEN_SIZE,
width=PointNavRoboThorBaseConfig.SCREEN_SIZE,
use_normalization=True,
uuid="depth_lowres",
),
GPSCompassSensorRoboThor(),
]
def __init__(self):
super().__init__()
self.model_creation_handler = PointNavUnfrozenResNetWithGRUActorCriticMixin(
backbone="simple_cnn",
sensors=self.SENSORS,
auxiliary_uuids=[],
add_prev_actions=True,
multiple_beliefs=False,
belief_fusion=None,
)
def training_pipeline(self, **kwargs) -> TrainingPipeline:
return PointNavPPOMixin.training_pipeline(
auxiliary_uuids=[],
multiple_beliefs=False,
normalize_advantage=True,
advance_scene_rollout_period=self.ADVANCE_SCENE_ROLLOUT_PERIOD,
)
def create_model(self, **kwargs):
return self.model_creation_handler.create_model(**kwargs)
def tag(self):
return "PointNav-RoboTHOR-RGBD-SimpleConv-DDPPO"
|
allenact-main
|
projects/pointnav_baselines/experiments/robothor/pointnav_robothor_rgbd_simpleconvgru_ddppo.py
|
from allenact.utils.experiment_utils import TrainingPipeline
from allenact_plugins.robothor_plugin.robothor_sensors import (
DepthSensorThor,
GPSCompassSensorRoboThor,
)
from projects.pointnav_baselines.mixins import (
PointNavUnfrozenResNetWithGRUActorCriticMixin,
)
from projects.pointnav_baselines.experiments.robothor.pointnav_robothor_base import (
PointNavRoboThorBaseConfig,
)
from projects.pointnav_baselines.mixins import PointNavPPOMixin
class PointNavRoboThorRGBPPOExperimentConfig(PointNavRoboThorBaseConfig,):
"""An Point Navigation experiment configuration in RoboTHOR with Depth
input."""
SENSORS = [
DepthSensorThor(
height=PointNavRoboThorBaseConfig.SCREEN_SIZE,
width=PointNavRoboThorBaseConfig.SCREEN_SIZE,
use_normalization=True,
uuid="depth_lowres",
),
GPSCompassSensorRoboThor(),
]
def __init__(self):
super().__init__()
self.model_creation_handler = PointNavUnfrozenResNetWithGRUActorCriticMixin(
backbone="simple_cnn",
sensors=self.SENSORS,
auxiliary_uuids=[],
add_prev_actions=True,
multiple_beliefs=False,
belief_fusion=None,
)
def training_pipeline(self, **kwargs) -> TrainingPipeline:
return PointNavPPOMixin.training_pipeline(
auxiliary_uuids=[],
multiple_beliefs=False,
normalize_advantage=True,
advance_scene_rollout_period=self.ADVANCE_SCENE_ROLLOUT_PERIOD,
)
def create_model(self, **kwargs):
return self.model_creation_handler.create_model(**kwargs)
def tag(self):
return "PointNav-RoboTHOR-Depth-SimpleConv-DDPPO"
|
allenact-main
|
projects/pointnav_baselines/experiments/robothor/pointnav_robothor_depth_simpleconvgru_ddppo.py
|
allenact-main
|
projects/pointnav_baselines/experiments/robothor/__init__.py
|
|
from allenact.utils.experiment_utils import TrainingPipeline
from allenact_plugins.ithor_plugin.ithor_sensors import RGBSensorThor
from allenact_plugins.robothor_plugin.robothor_sensors import GPSCompassSensorRoboThor
from projects.pointnav_baselines.mixins import (
PointNavUnfrozenResNetWithGRUActorCriticMixin,
)
from projects.pointnav_baselines.experiments.robothor.pointnav_robothor_base import (
PointNavRoboThorBaseConfig,
)
from projects.pointnav_baselines.mixins import PointNavPPOMixin
class PointNavRoboThorRGBPPOExperimentConfig(PointNavRoboThorBaseConfig,):
"""An Point Navigation experiment configuration in RoboThor with RGB
input."""
SENSORS = [
RGBSensorThor(
height=PointNavRoboThorBaseConfig.SCREEN_SIZE,
width=PointNavRoboThorBaseConfig.SCREEN_SIZE,
use_resnet_normalization=True,
uuid="rgb_lowres",
),
GPSCompassSensorRoboThor(),
]
def __init__(self):
super().__init__()
self.model_creation_handler = PointNavUnfrozenResNetWithGRUActorCriticMixin(
backbone="simple_cnn",
sensors=self.SENSORS,
auxiliary_uuids=[],
add_prev_actions=True,
multiple_beliefs=False,
belief_fusion=None,
)
def training_pipeline(self, **kwargs) -> TrainingPipeline:
return PointNavPPOMixin.training_pipeline(
auxiliary_uuids=[],
multiple_beliefs=False,
normalize_advantage=True,
advance_scene_rollout_period=self.ADVANCE_SCENE_ROLLOUT_PERIOD,
)
def create_model(self, **kwargs):
return self.model_creation_handler.create_model(**kwargs)
def tag(self):
return "PointNav-RoboTHOR-RGB-SimpleConv-DDPPO"
|
allenact-main
|
projects/pointnav_baselines/experiments/robothor/pointnav_robothor_rgb_simpleconvgru_ddppo.py
|
import os
from abc import ABC
from projects.pointnav_baselines.experiments.pointnav_thor_base import (
PointNavThorBaseConfig,
)
class PointNavRoboThorBaseConfig(PointNavThorBaseConfig, ABC):
"""The base config for all iTHOR PointNav experiments."""
NUM_PROCESSES = 60
TRAIN_DATASET_DIR = os.path.join(os.getcwd(), "datasets/robothor-pointnav/train")
VAL_DATASET_DIR = os.path.join(os.getcwd(), "datasets/robothor-pointnav/val")
|
allenact-main
|
projects/pointnav_baselines/experiments/robothor/pointnav_robothor_base.py
|
from allenact.utils.experiment_utils import TrainingPipeline
from allenact_plugins.habitat_plugin.habitat_sensors import RGBSensorHabitat
from allenact_plugins.habitat_plugin.habitat_sensors import (
TargetCoordinatesSensorHabitat,
)
from projects.pointnav_baselines.experiments.habitat.pointnav_habitat_base import (
PointNavHabitatBaseConfig,
)
from projects.pointnav_baselines.mixins import PointNavPPOMixin
from projects.pointnav_baselines.mixins import (
PointNavUnfrozenResNetWithGRUActorCriticMixin,
)
class PointNavHabitatDepthDeterministiSimpleConvGRUDDPPOExperimentConfig(
PointNavHabitatBaseConfig
):
"""An Point Navigation experiment configuration in Habitat with Depth
input."""
SENSORS = [
RGBSensorHabitat(
height=PointNavHabitatBaseConfig.SCREEN_SIZE,
width=PointNavHabitatBaseConfig.SCREEN_SIZE,
use_resnet_normalization=True,
),
TargetCoordinatesSensorHabitat(coordinate_dims=2),
]
def __init__(self):
super().__init__()
self.model_creation_handler = PointNavUnfrozenResNetWithGRUActorCriticMixin(
backbone="simple_cnn",
sensors=self.SENSORS,
auxiliary_uuids=[],
add_prev_actions=True,
multiple_beliefs=False,
belief_fusion=None,
)
def training_pipeline(self, **kwargs) -> TrainingPipeline:
return PointNavPPOMixin.training_pipeline(
auxiliary_uuids=[],
multiple_beliefs=False,
normalize_advantage=True,
advance_scene_rollout_period=self.ADVANCE_SCENE_ROLLOUT_PERIOD,
)
def create_model(self, **kwargs):
return self.model_creation_handler.create_model(**kwargs)
@classmethod
def tag(cls):
return "PointNav-Habitat-RGB-SimpleConv-DDPPO"
|
allenact-main
|
projects/pointnav_baselines/experiments/habitat/pointnav_habitat_rgb_simpleconvgru_ddppo.py
|
from allenact.utils.experiment_utils import TrainingPipeline
from allenact_plugins.habitat_plugin.habitat_sensors import DepthSensorHabitat
from allenact_plugins.habitat_plugin.habitat_sensors import RGBSensorHabitat
from allenact_plugins.habitat_plugin.habitat_sensors import (
TargetCoordinatesSensorHabitat,
)
from projects.pointnav_baselines.experiments.habitat.pointnav_habitat_base import (
PointNavHabitatBaseConfig,
)
from projects.pointnav_baselines.mixins import PointNavPPOMixin
from projects.pointnav_baselines.mixins import (
PointNavUnfrozenResNetWithGRUActorCriticMixin,
)
class PointNavHabitatDepthDeterministiSimpleConvGRUDDPPOExperimentConfig(
PointNavHabitatBaseConfig
):
"""An Point Navigation experiment configuration in Habitat with RGBD
input."""
SENSORS = [
RGBSensorHabitat(
height=PointNavHabitatBaseConfig.SCREEN_SIZE,
width=PointNavHabitatBaseConfig.SCREEN_SIZE,
use_resnet_normalization=True,
),
DepthSensorHabitat(
height=PointNavHabitatBaseConfig.SCREEN_SIZE,
width=PointNavHabitatBaseConfig.SCREEN_SIZE,
use_normalization=True,
),
TargetCoordinatesSensorHabitat(coordinate_dims=2),
]
def __init__(self):
super().__init__()
self.model_creation_handler = PointNavUnfrozenResNetWithGRUActorCriticMixin(
backbone="simple_cnn",
sensors=self.SENSORS,
auxiliary_uuids=[],
add_prev_actions=True,
multiple_beliefs=False,
belief_fusion=None,
)
def training_pipeline(self, **kwargs) -> TrainingPipeline:
return PointNavPPOMixin.training_pipeline(
auxiliary_uuids=[],
multiple_beliefs=False,
normalize_advantage=True,
advance_scene_rollout_period=self.ADVANCE_SCENE_ROLLOUT_PERIOD,
)
def create_model(self, **kwargs):
return self.model_creation_handler.create_model(**kwargs)
def tag(self):
return "PointNav-Habitat-RGBD-SimpleConv-DDPPO"
|
allenact-main
|
projects/pointnav_baselines/experiments/habitat/pointnav_habitat_rgbd_simpleconvgru_ddppo.py
|
allenact-main
|
projects/pointnav_baselines/experiments/habitat/__init__.py
|
|
import os
from abc import ABC
from typing import Dict, Any, List, Optional, Sequence, Union
import gym
import torch
# noinspection PyUnresolvedReferences
import habitat
from allenact.base_abstractions.experiment_config import MachineParams
from allenact.base_abstractions.preprocessor import (
SensorPreprocessorGraph,
Preprocessor,
)
from allenact.base_abstractions.sensor import SensorSuite
from allenact.base_abstractions.task import TaskSampler
from allenact.embodiedai.sensors.vision_sensors import RGBSensor, DepthSensor
from allenact.utils.experiment_utils import evenly_distribute_count_into_bins, Builder
from allenact.utils.system import get_logger
from allenact_plugins.habitat_plugin.habitat_constants import (
HABITAT_DATASETS_DIR,
HABITAT_CONFIGS_DIR,
HABITAT_SCENE_DATASETS_DIR,
)
from allenact_plugins.habitat_plugin.habitat_task_samplers import PointNavTaskSampler
from allenact_plugins.habitat_plugin.habitat_tasks import PointNavTask
from allenact_plugins.habitat_plugin.habitat_utils import (
get_habitat_config,
construct_env_configs,
)
from projects.pointnav_baselines.experiments.pointnav_base import PointNavBaseConfig
def create_pointnav_config(
config_yaml_path: str,
mode: str,
scenes_path: str,
simulator_gpu_ids: Sequence[int],
distance_to_goal: float,
rotation_degrees: float,
step_size: float,
max_steps: int,
num_processes: int,
camera_width: int,
camera_height: int,
using_rgb: bool,
using_depth: bool,
training: bool,
num_episode_sample: int,
) -> habitat.Config:
config = get_habitat_config(config_yaml_path)
config.defrost()
config.NUM_PROCESSES = num_processes
config.SIMULATOR_GPU_IDS = simulator_gpu_ids
config.DATASET.SCENES_DIR = HABITAT_SCENE_DATASETS_DIR
config.DATASET.DATA_PATH = scenes_path
config.SIMULATOR.AGENT_0.SENSORS = []
if using_rgb:
config.SIMULATOR.AGENT_0.SENSORS.append("RGB_SENSOR")
if using_depth:
config.SIMULATOR.AGENT_0.SENSORS.append("DEPTH_SENSOR")
config.SIMULATOR.RGB_SENSOR.WIDTH = camera_width
config.SIMULATOR.RGB_SENSOR.HEIGHT = camera_height
config.SIMULATOR.DEPTH_SENSOR.WIDTH = camera_width
config.SIMULATOR.DEPTH_SENSOR.HEIGHT = camera_height
config.SIMULATOR.TURN_ANGLE = rotation_degrees
config.SIMULATOR.FORWARD_STEP_SIZE = step_size
config.ENVIRONMENT.MAX_EPISODE_STEPS = max_steps
config.TASK.TYPE = "Nav-v0"
config.TASK.SUCCESS_DISTANCE = distance_to_goal
config.TASK.SENSORS = ["POINTGOAL_WITH_GPS_COMPASS_SENSOR"]
config.TASK.POINTGOAL_WITH_GPS_COMPASS_SENSOR.GOAL_FORMAT = "POLAR"
config.TASK.POINTGOAL_WITH_GPS_COMPASS_SENSOR.DIMENSIONALITY = 2
config.TASK.GOAL_SENSOR_UUID = "pointgoal_with_gps_compass"
config.TASK.MEASUREMENTS = ["DISTANCE_TO_GOAL", "SUCCESS", "SPL"]
config.TASK.SPL.TYPE = "SPL"
config.TASK.SPL.SUCCESS_DISTANCE = distance_to_goal
config.TASK.SUCCESS.SUCCESS_DISTANCE = distance_to_goal
if not training:
config.SEED = 0
config.ENVIRONMENT.ITERATOR_OPTIONS.SHUFFLE = False
if num_episode_sample > 0:
config.ENVIRONMENT.ITERATOR_OPTIONS.NUM_EPISODE_SAMPLE = num_episode_sample
config.MODE = mode
config.freeze()
return config
class PointNavHabitatBaseConfig(PointNavBaseConfig, ABC):
"""The base config for all Habitat PointNav experiments."""
# selected auxiliary uuids
## if comment all the keys, then it's vanilla DD-PPO
AUXILIARY_UUIDS = [
# InverseDynamicsLoss.UUID,
# TemporalDistanceLoss.UUID,
# CPCA1Loss.UUID,
# CPCA4Loss.UUID,
# CPCA8Loss.UUID,
# CPCA16Loss.UUID,
]
ADD_PREV_ACTIONS = False
MULTIPLE_BELIEFS = False
BELIEF_FUSION = ( # choose one
None
# AttentiveFusion
# AverageFusion
# SoftmaxFusion
)
FAILED_END_REWARD = -1.0
TASK_DATA_DIR_TEMPLATE = os.path.join(
HABITAT_DATASETS_DIR, "pointnav/gibson/v1/{}/{}.json.gz"
)
BASE_CONFIG_YAML_PATH = os.path.join(
HABITAT_CONFIGS_DIR, "tasks/pointnav_gibson.yaml"
)
ACTION_SPACE = gym.spaces.Discrete(len(PointNavTask.class_action_names()))
DEFAULT_NUM_TRAIN_PROCESSES = (
5 * torch.cuda.device_count() if torch.cuda.is_available() else 1
)
DEFAULT_NUM_TEST_PROCESSES = 10
DEFAULT_TRAIN_GPU_IDS = tuple(range(torch.cuda.device_count()))
DEFAULT_VALID_GPU_IDS = [torch.cuda.device_count() - 1]
DEFAULT_TEST_GPU_IDS = [torch.cuda.device_count() - 1]
def __init__(
self,
debug: bool = False,
num_train_processes: Optional[int] = None,
num_test_processes: Optional[int] = None,
test_on_validation: bool = False,
run_valid: bool = True,
train_gpu_ids: Optional[Sequence[int]] = None,
val_gpu_ids: Optional[Sequence[int]] = None,
test_gpu_ids: Optional[Sequence[int]] = None,
**kwargs,
):
super().__init__(**kwargs)
def v_or_default(v, default):
return v if v is not None else default
self.num_train_processes = v_or_default(
num_train_processes, self.DEFAULT_NUM_TRAIN_PROCESSES
)
self.num_test_processes = v_or_default(
num_test_processes, (10 if torch.cuda.is_available() else 1)
)
self.test_on_validation = test_on_validation
self.run_valid = run_valid
self.train_gpu_ids = v_or_default(train_gpu_ids, self.DEFAULT_TRAIN_GPU_IDS)
self.val_gpu_ids = v_or_default(
val_gpu_ids, self.DEFAULT_VALID_GPU_IDS if run_valid else []
)
self.test_gpu_ids = v_or_default(test_gpu_ids, self.DEFAULT_TEST_GPU_IDS)
def create_config(
mode: str,
scenes_path: str,
num_processes: int,
simulator_gpu_ids: Sequence[int],
training: bool = True,
num_episode_sample: int = -1,
):
return create_pointnav_config(
config_yaml_path=self.BASE_CONFIG_YAML_PATH,
mode=mode,
scenes_path=scenes_path,
simulator_gpu_ids=simulator_gpu_ids,
distance_to_goal=self.DISTANCE_TO_GOAL,
rotation_degrees=self.ROTATION_DEGREES,
step_size=self.STEP_SIZE,
max_steps=self.MAX_STEPS,
num_processes=num_processes,
camera_width=self.CAMERA_WIDTH,
camera_height=self.CAMERA_HEIGHT,
using_rgb=any(isinstance(s, RGBSensor) for s in self.SENSORS),
using_depth=any(isinstance(s, DepthSensor) for s in self.SENSORS),
training=training,
num_episode_sample=num_episode_sample,
)
self.TRAIN_CONFIG = create_config(
mode="train",
scenes_path=self.train_scenes_path(),
num_processes=self.num_train_processes,
simulator_gpu_ids=self.train_gpu_ids,
training=True,
)
self.VALID_CONFIG = create_config(
mode="validate",
scenes_path=self.valid_scenes_path(),
num_processes=1,
simulator_gpu_ids=self.val_gpu_ids,
training=False,
num_episode_sample=200,
)
self.TEST_CONFIG = create_config(
mode="validate",
scenes_path=self.test_scenes_path(),
num_processes=self.num_test_processes,
simulator_gpu_ids=self.test_gpu_ids,
training=False,
)
self.TRAIN_CONFIGS_PER_PROCESS = construct_env_configs(
self.TRAIN_CONFIG, allow_scene_repeat=True
)
if debug:
get_logger().warning("IN DEBUG MODE, WILL ONLY USE `Adrian` SCENE!!!")
for config in self.TRAIN_CONFIGS_PER_PROCESS:
config.defrost()
config.DATASET.CONTENT_SCENES = ["Adrian"]
config.freeze()
self.TEST_CONFIG_PER_PROCESS = construct_env_configs(
self.TEST_CONFIG, allow_scene_repeat=False
)
def train_scenes_path(self):
return self.TASK_DATA_DIR_TEMPLATE.format(*(["train"] * 2))
def valid_scenes_path(self):
return self.TASK_DATA_DIR_TEMPLATE.format(*(["val"] * 2))
def test_scenes_path(self):
get_logger().warning("Running tests on the validation set!")
return self.TASK_DATA_DIR_TEMPLATE.format(*(["val"] * 2))
# return self.TASK_DATA_DIR_TEMPLATE.format(*(["test"] * 2))
@classmethod
def tag(cls):
return "PointNav"
def preprocessors(self) -> Sequence[Union[Preprocessor, Builder[Preprocessor]]]:
return tuple()
def machine_params(self, mode="train", **kwargs):
has_gpus = torch.cuda.is_available()
if not has_gpus:
gpu_ids = []
nprocesses = 1
elif mode == "train":
gpu_ids = self.train_gpu_ids
nprocesses = self.num_train_processes
elif mode == "valid":
gpu_ids = self.val_gpu_ids
nprocesses = 1 if self.run_valid else 0
elif mode == "test":
gpu_ids = self.test_gpu_ids
nprocesses = self.num_test_processes
else:
raise NotImplementedError("mode must be 'train', 'valid', or 'test'.")
if has_gpus:
nprocesses = evenly_distribute_count_into_bins(nprocesses, len(gpu_ids))
sensor_preprocessor_graph = (
SensorPreprocessorGraph(
source_observation_spaces=SensorSuite(self.SENSORS).observation_spaces,
preprocessors=self.preprocessors(),
)
if mode == "train"
or (
(isinstance(nprocesses, int) and nprocesses > 0)
or (isinstance(nprocesses, Sequence) and sum(nprocesses) > 0)
)
else None
)
return MachineParams(
nprocesses=nprocesses,
devices=gpu_ids,
sensor_preprocessor_graph=sensor_preprocessor_graph,
)
@classmethod
def make_sampler_fn(cls, **kwargs) -> TaskSampler:
return PointNavTaskSampler(
**{"failed_end_reward": cls.FAILED_END_REWARD, **kwargs} # type: ignore
)
def train_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
config = self.TRAIN_CONFIGS_PER_PROCESS[process_ind]
return {
"env_config": config,
"max_steps": self.MAX_STEPS,
"sensors": self.SENSORS,
"action_space": self.ACTION_SPACE,
"distance_to_goal": self.DISTANCE_TO_GOAL,
}
def valid_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
if total_processes != 1:
raise NotImplementedError(
"In validation, `total_processes` must equal 1 for habitat tasks"
)
return {
"env_config": self.VALID_CONFIG,
"max_steps": self.MAX_STEPS,
"sensors": self.SENSORS,
"action_space": gym.spaces.Discrete(len(PointNavTask.class_action_names())),
"distance_to_goal": self.DISTANCE_TO_GOAL,
}
def test_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
config = self.TEST_CONFIG_PER_PROCESS[process_ind]
return {
"env_config": config,
"max_steps": self.MAX_STEPS,
"sensors": self.SENSORS,
"action_space": gym.spaces.Discrete(len(PointNavTask.class_action_names())),
"distance_to_goal": self.DISTANCE_TO_GOAL,
}
|
allenact-main
|
projects/pointnav_baselines/experiments/habitat/pointnav_habitat_base.py
|
from allenact.utils.experiment_utils import TrainingPipeline
from allenact_plugins.habitat_plugin.habitat_sensors import (
DepthSensorHabitat,
TargetCoordinatesSensorHabitat,
)
from projects.pointnav_baselines.experiments.habitat.pointnav_habitat_base import (
PointNavHabitatBaseConfig,
)
from projects.pointnav_baselines.mixins import (
PointNavPPOMixin,
PointNavUnfrozenResNetWithGRUActorCriticMixin,
)
class PointNavHabitatDepthDeterministiSimpleConvGRUDDPPOExperimentConfig(
PointNavHabitatBaseConfig,
):
"""An Point Navigation experiment configuration in Habitat with Depth
input."""
SENSORS = [
DepthSensorHabitat(
height=PointNavHabitatBaseConfig.SCREEN_SIZE,
width=PointNavHabitatBaseConfig.SCREEN_SIZE,
use_normalization=True,
),
TargetCoordinatesSensorHabitat(coordinate_dims=2),
]
def __init__(self):
super().__init__()
self.model_creation_handler = PointNavUnfrozenResNetWithGRUActorCriticMixin(
backbone="simple_cnn",
sensors=self.SENSORS,
auxiliary_uuids=[],
add_prev_actions=True,
multiple_beliefs=False,
belief_fusion=None,
)
def training_pipeline(self, **kwargs) -> TrainingPipeline:
return PointNavPPOMixin.training_pipeline(
auxiliary_uuids=[],
multiple_beliefs=False,
normalize_advantage=True,
advance_scene_rollout_period=self.ADVANCE_SCENE_ROLLOUT_PERIOD,
)
def create_model(self, **kwargs):
return self.model_creation_handler.create_model(**kwargs)
def tag(self):
return "PointNav-Habitat-Depth-SimpleConv-DDPPO"
|
allenact-main
|
projects/pointnav_baselines/experiments/habitat/pointnav_habitat_depth_simpleconvgru_ddppo.py
|
allenact-main
|
projects/pointnav_baselines/experiments/habitat/clip/__init__.py
|
|
from typing import Sequence, Union
import torch.nn as nn
from allenact.base_abstractions.preprocessor import Preprocessor
from allenact.utils.experiment_utils import Builder, TrainingPipeline
from allenact_plugins.clip_plugin.clip_preprocessors import ClipResNetPreprocessor
from allenact_plugins.habitat_plugin.habitat_sensors import (
RGBSensorHabitat,
TargetCoordinatesSensorHabitat,
)
from projects.objectnav_baselines.experiments.clip.mixins import (
ClipResNetPreprocessGRUActorCriticMixin,
)
from projects.pointnav_baselines.experiments.habitat.pointnav_habitat_base import (
PointNavHabitatBaseConfig,
)
from projects.pointnav_baselines.mixins import PointNavPPOMixin
class PointNavHabitatRGBClipResNet50GRUDDPPOExperimentConfig(PointNavHabitatBaseConfig):
"""An Point Navigation experiment configuration in Habitat with Depth
input."""
CLIP_MODEL_TYPE = "RN50"
SENSORS = [
RGBSensorHabitat(
height=PointNavHabitatBaseConfig.SCREEN_SIZE,
width=PointNavHabitatBaseConfig.SCREEN_SIZE,
use_resnet_normalization=True,
mean=ClipResNetPreprocessor.CLIP_RGB_MEANS,
stdev=ClipResNetPreprocessor.CLIP_RGB_STDS,
),
TargetCoordinatesSensorHabitat(coordinate_dims=2),
]
def __init__(self, add_prev_actions: bool = False, **kwargs):
super().__init__(**kwargs)
self.preprocessing_and_model = ClipResNetPreprocessGRUActorCriticMixin(
sensors=self.SENSORS,
clip_model_type=self.CLIP_MODEL_TYPE,
screen_size=self.SCREEN_SIZE,
goal_sensor_type=TargetCoordinatesSensorHabitat,
)
self.add_prev_actions = add_prev_actions
def training_pipeline(self, **kwargs) -> TrainingPipeline:
return PointNavPPOMixin.training_pipeline(
auxiliary_uuids=[],
multiple_beliefs=False,
normalize_advantage=False,
advance_scene_rollout_period=self.ADVANCE_SCENE_ROLLOUT_PERIOD,
)
def preprocessors(self) -> Sequence[Union[Preprocessor, Builder[Preprocessor]]]:
return self.preprocessing_and_model.preprocessors()
def create_model(self, **kwargs) -> nn.Module:
return self.preprocessing_and_model.create_model(
num_actions=self.ACTION_SPACE.n,
add_prev_actions=self.add_prev_actions,
**kwargs,
)
@classmethod
def tag(cls):
return "PointNav-Habitat-RGB-ClipResNet50GRU-DDPPO"
|
allenact-main
|
projects/pointnav_baselines/experiments/habitat/clip/pointnav_habitat_rgb_clipresnet50gru_ddppo.py
|
from allenact.utils.experiment_utils import TrainingPipeline
from allenact_plugins.ithor_plugin.ithor_sensors import RGBSensorThor
from allenact_plugins.robothor_plugin.robothor_sensors import DepthSensorThor
from allenact_plugins.robothor_plugin.robothor_sensors import GPSCompassSensorRoboThor
from projects.pointnav_baselines.mixins import (
PointNavUnfrozenResNetWithGRUActorCriticMixin,
)
from projects.pointnav_baselines.experiments.ithor.pointnav_ithor_base import (
PointNaviThorBaseConfig,
)
from projects.pointnav_baselines.mixins import PointNavPPOMixin
class PointNaviThorRGBDPPOExperimentConfig(PointNaviThorBaseConfig):
"""An Point Navigation experiment configuration in iThor with RGBD
input."""
SENSORS = [
RGBSensorThor(
height=PointNaviThorBaseConfig.SCREEN_SIZE,
width=PointNaviThorBaseConfig.SCREEN_SIZE,
use_resnet_normalization=True,
uuid="rgb_lowres",
),
DepthSensorThor(
height=PointNaviThorBaseConfig.SCREEN_SIZE,
width=PointNaviThorBaseConfig.SCREEN_SIZE,
use_normalization=True,
uuid="depth_lowres",
),
GPSCompassSensorRoboThor(),
]
def __init__(self):
super().__init__()
self.model_creation_handler = PointNavUnfrozenResNetWithGRUActorCriticMixin(
backbone="simple_cnn",
sensors=self.SENSORS,
auxiliary_uuids=[],
add_prev_actions=True,
multiple_beliefs=False,
belief_fusion=None,
)
def training_pipeline(self, **kwargs) -> TrainingPipeline:
return PointNavPPOMixin.training_pipeline(
auxiliary_uuids=[],
multiple_beliefs=False,
normalize_advantage=True,
advance_scene_rollout_period=self.ADVANCE_SCENE_ROLLOUT_PERIOD,
)
def create_model(self, **kwargs):
return self.model_creation_handler.create_model(**kwargs)
def tag(self):
return "PointNav-iTHOR-RGBD-SimpleConv-DDPPO"
|
allenact-main
|
projects/pointnav_baselines/experiments/ithor/pointnav_ithor_rgbd_simpleconvgru_ddppo.py
|
allenact-main
|
projects/pointnav_baselines/experiments/ithor/__init__.py
|
|
from allenact.utils.experiment_utils import TrainingPipeline
from allenact_plugins.ithor_plugin.ithor_sensors import RGBSensorThor
from allenact_plugins.robothor_plugin.robothor_sensors import GPSCompassSensorRoboThor
from projects.pointnav_baselines.mixins import (
PointNavUnfrozenResNetWithGRUActorCriticMixin,
)
from projects.pointnav_baselines.experiments.ithor.pointnav_ithor_base import (
PointNaviThorBaseConfig,
)
from projects.pointnav_baselines.mixins import PointNavPPOMixin
class PointNaviThorRGBPPOExperimentConfig(PointNaviThorBaseConfig):
"""An Point Navigation experiment configuration in iThor with RGB input."""
SENSORS = [
RGBSensorThor(
height=PointNaviThorBaseConfig.SCREEN_SIZE,
width=PointNaviThorBaseConfig.SCREEN_SIZE,
use_resnet_normalization=True,
uuid="rgb_lowres",
),
GPSCompassSensorRoboThor(),
]
def __init__(self):
super().__init__()
self.model_creation_handler = PointNavUnfrozenResNetWithGRUActorCriticMixin(
backbone="simple_cnn",
sensors=self.SENSORS,
auxiliary_uuids=[],
add_prev_actions=True,
multiple_beliefs=False,
belief_fusion=None,
)
def training_pipeline(self, **kwargs) -> TrainingPipeline:
return PointNavPPOMixin.training_pipeline(
auxiliary_uuids=[],
multiple_beliefs=False,
normalize_advantage=True,
advance_scene_rollout_period=self.ADVANCE_SCENE_ROLLOUT_PERIOD,
)
def create_model(self, **kwargs):
return self.model_creation_handler.create_model(**kwargs)
def tag(self):
return "PointNav-iTHOR-RGB-SimpleConv-DDPPO"
|
allenact-main
|
projects/pointnav_baselines/experiments/ithor/pointnav_ithor_rgb_simpleconvgru_ddppo.py
|
import os
from abc import ABC
from projects.pointnav_baselines.experiments.pointnav_thor_base import (
PointNavThorBaseConfig,
)
class PointNaviThorBaseConfig(PointNavThorBaseConfig, ABC):
"""The base config for all iTHOR PointNav experiments."""
NUM_PROCESSES = 40
TRAIN_DATASET_DIR = os.path.join(os.getcwd(), "datasets/ithor-pointnav/train")
VAL_DATASET_DIR = os.path.join(os.getcwd(), "datasets/ithor-pointnav/val")
|
allenact-main
|
projects/pointnav_baselines/experiments/ithor/pointnav_ithor_base.py
|
from allenact.utils.experiment_utils import TrainingPipeline
from allenact_plugins.robothor_plugin.robothor_sensors import (
DepthSensorThor,
GPSCompassSensorRoboThor,
)
from projects.pointnav_baselines.mixins import (
PointNavUnfrozenResNetWithGRUActorCriticMixin,
)
from projects.pointnav_baselines.experiments.ithor.pointnav_ithor_base import (
PointNaviThorBaseConfig,
)
from projects.pointnav_baselines.mixins import PointNavPPOMixin
class PointNaviThorDepthPPOExperimentConfig(PointNaviThorBaseConfig):
"""An Point Navigation experiment configuration in iThor with Depth
input."""
SENSORS = [
DepthSensorThor(
height=PointNaviThorBaseConfig.SCREEN_SIZE,
width=PointNaviThorBaseConfig.SCREEN_SIZE,
use_normalization=True,
uuid="depth_lowres",
),
GPSCompassSensorRoboThor(),
]
def __init__(self):
super().__init__()
self.model_creation_handler = PointNavUnfrozenResNetWithGRUActorCriticMixin(
backbone="simple_cnn",
sensors=self.SENSORS,
auxiliary_uuids=[],
add_prev_actions=True,
multiple_beliefs=False,
belief_fusion=None,
)
def training_pipeline(self, **kwargs) -> TrainingPipeline:
return PointNavPPOMixin.training_pipeline(
auxiliary_uuids=[],
multiple_beliefs=False,
normalize_advantage=True,
advance_scene_rollout_period=self.ADVANCE_SCENE_ROLLOUT_PERIOD,
)
def create_model(self, **kwargs):
return self.model_creation_handler.create_model(**kwargs)
def tag(self):
return "PointNav-iTHOR-Depth-SimpleConv-DDPPO"
|
allenact-main
|
projects/pointnav_baselines/experiments/ithor/pointnav_ithor_depth_simpleconvgru_ddppo.py
|
import os
from typing import Dict, Any, List, Optional, Sequence
import gym
import torch
import torch.nn as nn
import torch.optim as optim
from torch.optim.lr_scheduler import LambdaLR
from torchvision import models
from allenact.algorithms.onpolicy_sync.losses import PPO
from allenact.algorithms.onpolicy_sync.losses.ppo import PPOConfig
from allenact.base_abstractions.experiment_config import ExperimentConfig, MachineParams
from allenact.base_abstractions.preprocessor import SensorPreprocessorGraph
from allenact.base_abstractions.sensor import SensorSuite
from allenact.base_abstractions.task import TaskSampler
from allenact.embodiedai.preprocessors.resnet import ResNetPreprocessor
from allenact.utils.experiment_utils import (
Builder,
PipelineStage,
TrainingPipeline,
LinearDecay,
evenly_distribute_count_into_bins,
)
from allenact_plugins.habitat_plugin.habitat_constants import (
HABITAT_DATASETS_DIR,
HABITAT_CONFIGS_DIR,
)
from allenact_plugins.habitat_plugin.habitat_sensors import (
RGBSensorHabitat,
TargetCoordinatesSensorHabitat,
)
from allenact_plugins.habitat_plugin.habitat_task_samplers import PointNavTaskSampler
from allenact_plugins.habitat_plugin.habitat_utils import (
construct_env_configs,
get_habitat_config,
)
from allenact_plugins.navigation_plugin.objectnav.models import (
ResnetTensorNavActorCritic,
)
from allenact_plugins.robothor_plugin.robothor_tasks import PointNavTask
class PointNavHabitatRGBPPOTutorialExperimentConfig(ExperimentConfig):
"""A Point Navigation experiment configuration in Habitat."""
# Task Parameters
MAX_STEPS = 500
REWARD_CONFIG = {
"step_penalty": -0.01,
"goal_success_reward": 10.0,
"failed_stop_reward": 0.0,
"shaping_weight": 1.0,
}
DISTANCE_TO_GOAL = 0.2
# Simulator Parameters
CAMERA_WIDTH = 640
CAMERA_HEIGHT = 480
SCREEN_SIZE = 224
# Training Engine Parameters
ADVANCE_SCENE_ROLLOUT_PERIOD: Optional[int] = None
NUM_PROCESSES = max(5 * torch.cuda.device_count() - 1, 4)
TRAINING_GPUS = list(range(torch.cuda.device_count()))
VALIDATION_GPUS = [torch.cuda.device_count() - 1]
TESTING_GPUS = [torch.cuda.device_count() - 1]
task_data_dir_template = os.path.join(
HABITAT_DATASETS_DIR, "pointnav/gibson/v1/{}/{}.json.gz"
)
TRAIN_SCENES = task_data_dir_template.format(*(["train"] * 2))
VALID_SCENES = task_data_dir_template.format(*(["val"] * 2))
TEST_SCENES = task_data_dir_template.format(*(["test"] * 2))
CONFIG = get_habitat_config(
os.path.join(HABITAT_CONFIGS_DIR, "tasks/pointnav_gibson.yaml")
)
CONFIG.defrost()
CONFIG.NUM_PROCESSES = NUM_PROCESSES
CONFIG.SIMULATOR_GPU_IDS = TRAINING_GPUS
CONFIG.DATASET.SCENES_DIR = "habitat/habitat-api/data/scene_datasets/"
CONFIG.DATASET.POINTNAVV1.CONTENT_SCENES = ["*"]
CONFIG.DATASET.DATA_PATH = TRAIN_SCENES
CONFIG.SIMULATOR.AGENT_0.SENSORS = ["RGB_SENSOR"]
CONFIG.SIMULATOR.RGB_SENSOR.WIDTH = CAMERA_WIDTH
CONFIG.SIMULATOR.RGB_SENSOR.HEIGHT = CAMERA_HEIGHT
CONFIG.SIMULATOR.TURN_ANGLE = 30
CONFIG.SIMULATOR.FORWARD_STEP_SIZE = 0.25
CONFIG.ENVIRONMENT.MAX_EPISODE_STEPS = MAX_STEPS
CONFIG.TASK.TYPE = "Nav-v0"
CONFIG.TASK.SUCCESS_DISTANCE = DISTANCE_TO_GOAL
CONFIG.TASK.SENSORS = ["POINTGOAL_WITH_GPS_COMPASS_SENSOR"]
CONFIG.TASK.POINTGOAL_WITH_GPS_COMPASS_SENSOR.GOAL_FORMAT = "POLAR"
CONFIG.TASK.POINTGOAL_WITH_GPS_COMPASS_SENSOR.DIMENSIONALITY = 2
CONFIG.TASK.GOAL_SENSOR_UUID = "pointgoal_with_gps_compass"
CONFIG.TASK.MEASUREMENTS = ["DISTANCE_TO_GOAL", "SUCCESS", "SPL"]
CONFIG.TASK.SPL.TYPE = "SPL"
CONFIG.TASK.SPL.SUCCESS_DISTANCE = DISTANCE_TO_GOAL
CONFIG.TASK.SUCCESS.SUCCESS_DISTANCE = DISTANCE_TO_GOAL
CONFIG.MODE = "train"
SENSORS = [
RGBSensorHabitat(
height=SCREEN_SIZE, width=SCREEN_SIZE, use_resnet_normalization=True,
),
TargetCoordinatesSensorHabitat(coordinate_dims=2),
]
PREPROCESSORS = [
Builder(
ResNetPreprocessor,
{
"input_height": SCREEN_SIZE,
"input_width": SCREEN_SIZE,
"output_width": 7,
"output_height": 7,
"output_dims": 512,
"pool": False,
"torchvision_resnet_model": models.resnet18,
"input_uuids": ["rgb_lowres"],
"output_uuid": "rgb_resnet",
},
),
]
OBSERVATIONS = [
"rgb_resnet",
"target_coordinates_ind",
]
TRAIN_CONFIGS = construct_env_configs(CONFIG)
@classmethod
def tag(cls):
return "PointNavHabitatRGBPPO"
@classmethod
def training_pipeline(cls, **kwargs):
ppo_steps = int(250000000)
lr = 3e-4
num_mini_batch = 1
update_repeats = 3
num_steps = 30
save_interval = 5000000
log_interval = 10000
gamma = 0.99
use_gae = True
gae_lambda = 0.95
max_grad_norm = 0.5
return TrainingPipeline(
save_interval=save_interval,
metric_accumulate_interval=log_interval,
optimizer_builder=Builder(optim.Adam, dict(lr=lr)),
num_mini_batch=num_mini_batch,
update_repeats=update_repeats,
max_grad_norm=max_grad_norm,
num_steps=num_steps,
named_losses={"ppo_loss": PPO(**PPOConfig)},
gamma=gamma,
use_gae=use_gae,
gae_lambda=gae_lambda,
advance_scene_rollout_period=cls.ADVANCE_SCENE_ROLLOUT_PERIOD,
pipeline_stages=[
PipelineStage(loss_names=["ppo_loss"], max_stage_steps=ppo_steps)
],
lr_scheduler_builder=Builder(
LambdaLR, {"lr_lambda": LinearDecay(steps=ppo_steps)}
),
)
def machine_params(self, mode="train", **kwargs):
if mode == "train":
workers_per_device = 1
gpu_ids = (
[]
if not torch.cuda.is_available()
else self.TRAINING_GPUS * workers_per_device
)
nprocesses = (
1
if not torch.cuda.is_available()
else evenly_distribute_count_into_bins(self.NUM_PROCESSES, len(gpu_ids))
)
elif mode == "valid":
nprocesses = 1
gpu_ids = [] if not torch.cuda.is_available() else self.VALIDATION_GPUS
elif mode == "test":
nprocesses = 1
gpu_ids = [] if not torch.cuda.is_available() else self.TESTING_GPUS
else:
raise NotImplementedError("mode must be 'train', 'valid', or 'test'.")
sensor_preprocessor_graph = (
SensorPreprocessorGraph(
source_observation_spaces=SensorSuite(self.SENSORS).observation_spaces,
preprocessors=self.PREPROCESSORS,
)
if mode == "train"
or (
(isinstance(nprocesses, int) and nprocesses > 0)
or (isinstance(nprocesses, Sequence) and sum(nprocesses) > 0)
)
else None
)
return MachineParams(
nprocesses=nprocesses,
devices=gpu_ids,
sensor_preprocessor_graph=sensor_preprocessor_graph,
)
# Define Model
@classmethod
def create_model(cls, **kwargs) -> nn.Module:
return ResnetTensorNavActorCritic(
action_space=gym.spaces.Discrete(len(PointNavTask.class_action_names())),
observation_space=kwargs["sensor_preprocessor_graph"].observation_spaces,
goal_sensor_uuid="target_coordinates_ind",
rgb_resnet_preprocessor_uuid="rgb_resnet",
hidden_size=512,
goal_dims=32,
)
# Define Task Sampler
@classmethod
def make_sampler_fn(cls, **kwargs) -> TaskSampler:
return PointNavTaskSampler(**kwargs)
def train_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
config = self.TRAIN_CONFIGS[process_ind]
return {
"env_config": config,
"max_steps": self.MAX_STEPS,
"sensors": self.SENSORS,
"action_space": gym.spaces.Discrete(len(PointNavTask.class_action_names())),
"distance_to_goal": self.DISTANCE_TO_GOAL, # type:ignore
}
def valid_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
config = self.CONFIG.clone()
config.defrost()
config.DATASET.DATA_PATH = self.VALID_SCENES
config.MODE = "validate"
config.freeze()
return {
"env_config": config,
"max_steps": self.MAX_STEPS,
"sensors": self.SENSORS,
"action_space": gym.spaces.Discrete(len(PointNavTask.class_action_names())),
"distance_to_goal": self.DISTANCE_TO_GOAL, # type:ignore
}
def test_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
raise NotImplementedError("Testing not implemented for this tutorial.")
|
allenact-main
|
projects/tutorials/pointnav_habitat_rgb_ddppo.py
|
# literate: tutorials/running-inference-on-a-pretrained-model.md
# %%
"""# Tutorial: Inference with a pre-trained model."""
# %%
"""
In this tutorial we will run inference on a pre-trained model for the PointNav task
in the RoboTHOR environment. In this task the agent is tasked with going to a specific location
within a realistic 3D environment.
For information on how to train a PointNav Model see [this tutorial](training-a-pointnav-model.md)
We will need to [install the full AllenAct library](../installation/installation-allenact.md#full-library),
the `robothor_plugin` requirements via
```bash
pip install -r allenact_plugins/robothor_plugin/extra_requirements.txt
```
and [download the
RoboTHOR Pointnav dataset](../installation/download-datasets.md) before we get started.
For this tutorial we will download the weights of a model trained on the debug dataset.
This can be done with a handy script in the `pretrained_model_ckpts` directory:
```bash
bash pretrained_model_ckpts/download_navigation_model_ckpts.sh robothor-pointnav-rgb-resnet
```
This will download the weights for an RGB model that has been
trained on the PointNav task in RoboTHOR to `pretrained_model_ckpts/robothor-pointnav-rgb-resnet`
Next we need to run the inference, using the PointNav experiment config from the
[tutorial on making a PointNav experiment](training-a-pointnav-model.md).
We can do this with the following command:
```bash
PYTHONPATH=. python allenact/main.py -o <PATH_TO_OUTPUT> -b <BASE_DIRECTORY_OF_YOUR_EXPERIMENT> -c <PATH_TO_CHECKPOINT> --eval
```
Where `<PATH_TO_OUTPUT>` is the location where the results of the test will be dumped, `<PATH_TO_CHECKPOINT>` is the
location of the downloaded model weights, and `<BASE_DIRECTORY_OF_YOUR_EXPERIMENT>` is a path to the directory where
our experiment definition is stored.
For our current setup the following command would work:
```bash
PYTHONPATH=. python allenact/main.py \
training_a_pointnav_model \
-o pretrained_model_ckpts/robothor-pointnav-rgb-resnet/ \
-b projects/tutorials \
-c pretrained_model_ckpts/robothor-pointnav-rgb-resnet/checkpoints/PointNavRobothorRGBPPO/2020-08-31_12-13-30/exp_PointNavRobothorRGBPPO__stage_00__steps_000039031200.pt \
--eval
```
For testing on all saved checkpoints we pass a directory to `--checkpoint` rather than just a single file:
```bash
PYTHONPATH=. python allenact/main.py \
training_a_pointnav_model \
-o pretrained_model_ckpts/robothor-pointnav-rgb-resnet/ \
-b projects/tutorials \
-c pretrained_model_ckpts/robothor-pointnav-rgb-resnet/checkpoints/PointNavRobothorRGBPPO/2020-08-31_12-13-30
--eval
```
## Visualization
We also show examples of visualizations that can be extracted from the `"valid"` and `"test"` modes. Currently,
visualization is still undergoing design changes and does not support multi-agent tasks, but the available functionality
is sufficient for pointnav in RoboThor.
Following up on the example above, we can make a specialized pontnav `ExperimentConfig` where we instantiate
the base visualization class, `VizSuite`, defined in
[`allenact.utils.viz_utils`](https://github.com/allenai/allenact/tree/master/allenact/utils/viz_utils.py), when in `test` mode.
Each visualization type can be thought of as a plugin to the base `VizSuite`. For example, all `episode_ids` passed to
`VizSuite` will be processed with each of the instantiated visualization types (possibly with the exception of the
`AgentViewViz`). In the example below we show how to instantiate different visualization types from 4 different data
sources.
The data sources available to `VizSuite` are:
* Task output (e.g. 2D trajectories)
* Vector task (e.g. egocentric views)
* Rollout storage (e.g. recurrent memory, taken action logprobs...)
* `ActorCriticOutput` (e.g. action probabilities)
The visualization types included below are:
* `TrajectoryViz`: Generic 2D trajectory view.
* `AgentViewViz`: RGB egocentric view.
* `ActorViz`: Action probabilities from `ActorCriticOutput[CategoricalDistr]`.
* `TensorViz1D`: Evolution of a point from RolloutStorage over time.
* `TensorViz2D`: Evolution of a vector from RolloutStorage over time.
* `ThorViz`: Specialized 2D trajectory view
[for RoboThor](https://github.com/allenai/allenact/tree/master/allenact_plugins/robothor_plugin/robothor_viz.py).
Note that we need to explicitly set the `episode_ids` that we wish to visualize. For `AgentViewViz` we have the option
of using a different (typically shorter) list of episodes or enforce the ones used for the rest of visualizations.
"""
# %% hide
from typing import Optional
from allenact.utils.viz_utils import (
VizSuite,
TrajectoryViz,
ActorViz,
AgentViewViz,
TensorViz1D,
TensorViz2D,
)
from allenact_plugins.robothor_plugin.robothor_viz import ThorViz
from projects.tutorials.training_a_pointnav_model import (
PointNavRoboThorRGBPPOExperimentConfig,
)
# %%
class PointNavRoboThorRGBPPOVizExperimentConfig(PointNavRoboThorRGBPPOExperimentConfig):
"""ExperimentConfig used to demonstrate how to set up visualization code.
# Attributes
viz_ep_ids : Scene names that will be visualized.
viz_video_ids : Scene names that will have videos visualizations associated with them.
"""
viz_ep_ids = [
"FloorPlan_Train1_1_3",
"FloorPlan_Train1_1_4",
"FloorPlan_Train1_1_5",
"FloorPlan_Train1_1_6",
]
viz_video_ids = [["FloorPlan_Train1_1_3"], ["FloorPlan_Train1_1_4"]]
viz: Optional[VizSuite] = None
def get_viz(self, mode):
if self.viz is not None:
return self.viz
self.viz = VizSuite(
episode_ids=self.viz_ep_ids,
mode=mode,
# Basic 2D trajectory visualizer (task output source):
base_trajectory=TrajectoryViz(
path_to_target_location=("task_info", "target",),
),
# Egocentric view visualizer (vector task source):
egeocentric=AgentViewViz(
max_video_length=100, episode_ids=self.viz_video_ids
),
# Default action probability visualizer (actor critic output source):
action_probs=ActorViz(figsize=(3.25, 10), fontsize=18),
# Default taken action logprob visualizer (rollout storage source):
taken_action_logprobs=TensorViz1D(),
# Same episode mask visualizer (rollout storage source):
episode_mask=TensorViz1D(rollout_source=("masks",)),
# Default recurrent memory visualizer (rollout storage source):
rnn_memory=TensorViz2D(rollout_source=("memory_first_last", "single_belief")),
# Specialized 2D trajectory visualizer (task output source):
thor_trajectory=ThorViz(
figsize=(16, 8),
viz_rows_cols=(448, 448),
scenes=("FloorPlan_Train{}_{}", 1, 1, 1, 1),
),
)
return self.viz
def machine_params(self, mode="train", **kwargs):
res = super().machine_params(mode, **kwargs)
if mode == "test":
res.set_visualizer(self.get_viz(mode))
return res
# %%
"""
Running test on the same downloaded models, but using the visualization-enabled `ExperimentConfig` with
```bash
PYTHONPATH=. python allenact/main.py \
running_inference_tutorial \
-o pretrained_model_ckpts/robothor-pointnav-rgb-resnet/ \
-b projects/tutorials \
-c pretrained_model_ckpts/robothor-pointnav-rgb-resnet/checkpoints/PointNavRobothorRGBPPO/2020-08-31_12-13-30/exp_PointNavRobothorRGBPPO__stage_00__steps_000039031200.pt \
--eval
```
generates different types of visualization and logs them in tensorboard. If everything is properly setup and
tensorboard includes the `robothor-pointnav-rgb-resnet` folder, under the `IMAGES` tab, we should see something similar
to

"""
|
allenact-main
|
projects/tutorials/running_inference_tutorial.py
|
import torch
import torch.optim as optim
from torch.optim.lr_scheduler import LambdaLR
from allenact.algorithms.onpolicy_sync.losses import PPO
from allenact.algorithms.onpolicy_sync.losses.imitation import Imitation
from allenact.algorithms.onpolicy_sync.losses.ppo import PPOConfig
from allenact.utils.experiment_utils import (
Builder,
PipelineStage,
TrainingPipeline,
LinearDecay,
)
from allenact.base_abstractions.sensor import ExpertActionSensor
from projects.tutorials.object_nav_ithor_ppo_one_object import (
ObjectNavThorPPOExperimentConfig,
ObjectNaviThorGridTask,
)
class ObjectNavThorDaggerThenPPOExperimentConfig(ObjectNavThorPPOExperimentConfig):
"""A simple object navigation experiment in THOR.
Training with DAgger and then PPO.
"""
SENSORS = ObjectNavThorPPOExperimentConfig.SENSORS + [
ExpertActionSensor(
action_space=len(ObjectNaviThorGridTask.class_action_names()),
),
]
@classmethod
def tag(cls):
return "ObjectNavThorDaggerThenPPO"
@classmethod
def training_pipeline(cls, **kwargs):
dagger_steos = int(1e4)
ppo_steps = int(1e6)
lr = 2.5e-4
num_mini_batch = 2 if not torch.cuda.is_available() else 6
update_repeats = 4
num_steps = 128
metric_accumulate_interval = cls.MAX_STEPS * 10 # Log every 10 max length tasks
save_interval = 10000
gamma = 0.99
use_gae = True
gae_lambda = 1.0
max_grad_norm = 0.5
return TrainingPipeline(
save_interval=save_interval,
metric_accumulate_interval=metric_accumulate_interval,
optimizer_builder=Builder(optim.Adam, dict(lr=lr)),
num_mini_batch=num_mini_batch,
update_repeats=update_repeats,
max_grad_norm=max_grad_norm,
num_steps=num_steps,
named_losses={
"ppo_loss": PPO(clip_decay=LinearDecay(ppo_steps), **PPOConfig),
"imitation_loss": Imitation(), # We add an imitation loss.
},
gamma=gamma,
use_gae=use_gae,
gae_lambda=gae_lambda,
advance_scene_rollout_period=cls.ADVANCE_SCENE_ROLLOUT_PERIOD,
pipeline_stages=[
PipelineStage(
loss_names=["imitation_loss"],
teacher_forcing=LinearDecay(
startp=1.0, endp=0.0, steps=dagger_steos,
),
max_stage_steps=dagger_steos,
),
PipelineStage(loss_names=["ppo_loss"], max_stage_steps=ppo_steps,),
],
lr_scheduler_builder=Builder(
LambdaLR, {"lr_lambda": LinearDecay(steps=ppo_steps)}
),
)
|
allenact-main
|
projects/tutorials/object_nav_ithor_dagger_then_ppo_one_object.py
|
# literate: tutorials/offpolicy-tutorial.md
# %%
"""# Tutorial: Off-policy training."""
# %%
"""
**Note** The provided commands to execute in this tutorial assume you have
[installed the full library](../installation/installation-allenact.md#full-library) and the `extra_requirements`
for the `babyai_plugin` and `minigrid_plugin`. The latter can be installed with:
```bash
pip install -r allenact_plugins/babyai_plugin/extra_requirements.txt; pip install -r allenact_plugins/minigrid_plugin/extra_requirements.txt
```
In this tutorial we'll learn how to train an agent from an external dataset by imitating expert actions via
Behavior Cloning. We'll use a [BabyAI agent](/api/allenact_plugins/babyai_plugin/babyai_models#BabyAIRecurrentACModel) to solve
`GoToLocal` tasks on [MiniGrid](https://github.com/maximecb/gym-minigrid); see the
`projects/babyai_baselines/experiments/go_to_local` directory for more details.
This tutorial assumes `AllenAct`'s [abstractions](../getting_started/abstractions.md) are known.
## The task
In a `GoToLocal` task, the agent immersed in a grid world has to navigate to a specific object in the presence of
multiple distractors, requiring the agent to understand `go to` instructions like "go to the red ball". For further
details, please consult the [original paper](https://arxiv.org/abs/1810.08272).
## Getting the dataset
We will use a large dataset (**more than 4 GB**) including expert demonstrations for `GoToLocal` tasks. To download
the data we'll run
```bash
PYTHONPATH=. python allenact_plugins/babyai_plugin/scripts/download_babyai_expert_demos.py GoToLocal
```
from the project's root directory, which will download `BabyAI-GoToLocal-v0.pkl` and `BabyAI-GoToLocal-v0_valid.pkl` to
the `allenact_plugins/babyai_plugin/data/demos` directory.
We will also generate small versions of the datasets, which will be useful if running on CPU, by calling
```bash
PYTHONPATH=. python allenact_plugins/babyai_plugin/scripts/truncate_expert_demos.py
```
from the project's root directory, which will generate `BabyAI-GoToLocal-v0-small.pkl` under the same
`allenact_plugins/babyai_plugin/data/demos` directory.
## Data storage
In order to train with an off-policy dataset, we need to define an `ExperienceStorage`. In AllenAct, an
`ExperienceStorage` object has two primary functions:
1. It stores/manages relevant data (e.g. similarly to the `Dataset` class in PyTorch).
2. It loads stored data into batches that will be used for loss computation (e.g. similarly to the `Dataloader`
class in PyTorch).
Unlike a PyTorch `Dataset` however, an `ExperienceStorage` object can build its dataset **at runtime** by processing
rollouts from the agent. This flexibility allows for us to, for exmaple, implement the experience replay datastructure
used in deep Q-learning. For this tutorial we won't need this additional functionality as our off-policy dataset
is a fixed collection of expert trajectories.
An example of a `ExperienceStorage` for BabyAI expert demos might look as follows:
"""
# %% import_summary allenact_plugins.minigrid_plugin.minigrid_offpolicy.MiniGridExpertTrajectoryStorage
# %%
"""
A complete example can be found in
[MiniGridExpertTrajectoryStorage](/api/allenact_plugins/minigrid_plugin/minigrid_offpolicy#MiniGridExpertTrajectoryStorage).
## Loss function
Off-policy losses must implement the
[`GenericAbstractLoss`](/api/allenact/base_abstractions/misc/#genericabstractloss)
interface. In this case, we minimize the cross-entropy between the actor's policy and the expert action:
"""
# %% import allenact_plugins.minigrid_plugin.minigrid_offpolicy.MiniGridOffPolicyExpertCELoss
# %%
"""
A complete example can be found in
[MiniGridOffPolicyExpertCELoss](/api/allenact_plugins/minigrid_plugin/minigrid_offpolicy#MiniGridOffPolicyExpertCELoss).
Note that in this case we train the entire actor, but it would also be possible to forward data through a different
subgraph of the ActorCriticModel.
## Experiment configuration
For the experiment configuration, we'll build on top of an existing
[base BabyAI GoToLocal Experiment Config](/api/projects/babyai_baselines/experiments/go_to_local/base/#basebabyaigotolocalexperimentconfig).
The complete `ExperimentConfig` file for off-policy training is
[here](/api/projects/tutorials/minigrid_offpolicy_tutorial/#bcoffpolicybabyaigotolocalexperimentconfig), but let's
focus on the most relevant aspect to enable this type of training:
providing an [OffPolicyPipelineComponent](/api/allenact/utils/experiment_utils/#offpolicypipelinecomponent) object as input to a
`PipelineStage` when instantiating the `TrainingPipeline` in the `training_pipeline` method.
"""
# %% hide
import os
from typing import Optional, List, Tuple
import torch
from gym_minigrid.minigrid import MiniGridEnv
from allenact.algorithms.onpolicy_sync.storage import RolloutBlockStorage
from allenact.utils.experiment_utils import (
PipelineStage,
StageComponent,
TrainingSettings,
)
from allenact_plugins.babyai_plugin.babyai_constants import (
BABYAI_EXPERT_TRAJECTORIES_DIR,
)
from allenact_plugins.minigrid_plugin.minigrid_offpolicy import (
MiniGridOffPolicyExpertCELoss,
MiniGridExpertTrajectoryStorage,
)
from projects.babyai_baselines.experiments.go_to_local.base import (
BaseBabyAIGoToLocalExperimentConfig,
)
# %%
class BCOffPolicyBabyAIGoToLocalExperimentConfig(BaseBabyAIGoToLocalExperimentConfig):
"""BC Off-policy imitation."""
DATASET: Optional[List[Tuple[str, bytes, List[int], MiniGridEnv.Actions]]] = None
GPU_ID = 0 if torch.cuda.is_available() else None
@classmethod
def tag(cls):
return "BabyAIGoToLocalBCOffPolicy"
@classmethod
def METRIC_ACCUMULATE_INTERVAL(cls):
# See BaseBabyAIGoToLocalExperimentConfig for how this is used.
return 1
@classmethod
def training_pipeline(cls, **kwargs):
total_train_steps = cls.TOTAL_IL_TRAIN_STEPS
ppo_info = cls.rl_loss_default("ppo", steps=-1)
num_mini_batch = ppo_info["num_mini_batch"]
update_repeats = ppo_info["update_repeats"]
# fmt: off
return cls._training_pipeline(
named_losses={
"offpolicy_expert_ce_loss": MiniGridOffPolicyExpertCELoss(
total_episodes_in_epoch=int(1e6)
),
},
named_storages={
"onpolicy": RolloutBlockStorage(),
"minigrid_offpolicy_expert": MiniGridExpertTrajectoryStorage(
data_path=os.path.join(
BABYAI_EXPERT_TRAJECTORIES_DIR,
"BabyAI-GoToLocal-v0{}.pkl".format(
"" if torch.cuda.is_available() else "-small"
),
),
num_samplers=cls.NUM_TRAIN_SAMPLERS,
rollout_len=cls.ROLLOUT_STEPS,
instr_len=cls.INSTR_LEN,
),
},
pipeline_stages=[
# Single stage, only with off-policy training
PipelineStage(
loss_names=["offpolicy_expert_ce_loss"], # no on-policy losses
max_stage_steps=total_train_steps, # keep sampling episodes in the stage
stage_components=[
StageComponent(
uuid="offpolicy",
storage_uuid="minigrid_offpolicy_expert",
loss_names=["offpolicy_expert_ce_loss"],
training_settings=TrainingSettings(
update_repeats=num_mini_batch * update_repeats,
num_mini_batch=1,
)
)
],
),
],
# As we don't have any on-policy losses, we set the next
# two values to zero to ensure we don't attempt to
# compute gradients for on-policy rollouts:
num_mini_batch=0,
update_repeats=0,
total_train_steps=total_train_steps,
)
# fmt: on
# %%
"""
You'll have noted that it is possible to combine on-policy and off-policy training in the same stage, even though here
we apply pure off-policy training.
## Training
We recommend using a machine with a CUDA-capable GPU for this experiment. In order to start training, we just need to
invoke
```bash
PYTHONPATH=. python allenact/main.py -b projects/tutorials minigrid_offpolicy_tutorial -m 8 -o <OUTPUT_PATH>
```
Note that with the `-m 8` option we limit to 8 the number of on-policy task sampling processes used between off-policy
updates.
If everything goes well, the training success should quickly reach values around 0.7-0.8 on GPU and converge to values
close to 1 if given sufficient time to train.
If running tensorboard, you'll notice a separate group of scalars named `train-offpolicy-losses` and
`train-offpolicy-misc` with losses, approximate "experiences per second" (i.e. the number of off-policy experiences/steps
being used to update the model per second), and other tracked values in addition to the standard `train-onpolicy-*`
used for on-policy training. In the `train-metrics` and `train-misc` sections you'll find the metrics
quantifying the performance of the agent throughout training and some other plots showing training details.
*Note that the x-axis for these plots is different than for the `train-offpolicy-*` sections*. This
is because these plots use the number of rollout steps as the x-axis (i.e. steps that the trained agent
takes interactively) while the `train-offpolicy-*` plots uses the number of offpolicy "experiences" that have
been shown to the agent.
A view of the training progress about 5 hours after starting on a CUDA-capable GPU should look similar to the below
(note that training reached >99% success after about 50 minutes).

"""
|
allenact-main
|
projects/tutorials/minigrid_offpolicy_tutorial.py
|
from math import ceil
from typing import Dict, Any, List, Optional
import gym
import numpy as np
import torch
import torch.nn as nn
import torch.optim as optim
from torch.optim.lr_scheduler import LambdaLR
from allenact.algorithms.onpolicy_sync.losses import PPO
from allenact.algorithms.onpolicy_sync.losses.ppo import PPOConfig
from allenact.base_abstractions.experiment_config import ExperimentConfig
from allenact.base_abstractions.sensor import SensorSuite
from allenact.base_abstractions.task import TaskSampler
from allenact.utils.experiment_utils import (
Builder,
PipelineStage,
TrainingPipeline,
LinearDecay,
)
from allenact.utils.multi_agent_viz_utils import MultiTrajectoryViz
from allenact.utils.viz_utils import VizSuite, AgentViewViz
from allenact_plugins.robothor_plugin.robothor_models import (
NavToPartnerActorCriticSimpleConvRNN,
)
from allenact_plugins.robothor_plugin.robothor_sensors import RGBSensorMultiRoboThor
from allenact_plugins.robothor_plugin.robothor_task_samplers import (
NavToPartnerTaskSampler,
)
from allenact_plugins.robothor_plugin.robothor_tasks import NavToPartnerTask
from allenact_plugins.robothor_plugin.robothor_viz import ThorMultiViz
class NavToPartnerRoboThorRGBPPOExperimentConfig(ExperimentConfig):
"""A Multi-Agent Navigation experiment configuration in RoboThor."""
# Task Parameters
MAX_STEPS = 500
REWARD_CONFIG = {
"step_penalty": -0.01,
"max_success_distance": 0.75,
"success_reward": 5.0,
}
# Simulator Parameters
CAMERA_WIDTH = 300
CAMERA_HEIGHT = 300
SCREEN_SIZE = 224
# Training Engine Parameters
ADVANCE_SCENE_ROLLOUT_PERIOD: Optional[int] = None
NUM_PROCESSES = 20
TRAINING_GPUS: List[int] = [0]
VALIDATION_GPUS: List[int] = [0]
TESTING_GPUS: List[int] = [0]
SENSORS = [
RGBSensorMultiRoboThor(
agent_count=2,
height=SCREEN_SIZE,
width=SCREEN_SIZE,
use_resnet_normalization=True,
uuid="rgb",
),
]
OBSERVATIONS = [
"rgb",
]
ENV_ARGS = dict(
width=CAMERA_WIDTH,
height=CAMERA_HEIGHT,
rotateStepDegrees=30.0,
visibilityDistance=1.0,
gridSize=0.25,
agentCount=2,
)
@classmethod
def tag(cls):
return "NavToPartnerRobothorRGBPPO"
@classmethod
def training_pipeline(cls, **kwargs):
ppo_steps = int(1000000)
lr = 3e-4
num_mini_batch = 1
update_repeats = 3
num_steps = 30
save_interval = 200000
log_interval = 1
gamma = 0.99
use_gae = True
gae_lambda = 0.95
max_grad_norm = 0.5
return TrainingPipeline(
save_interval=save_interval,
metric_accumulate_interval=log_interval,
optimizer_builder=Builder(optim.Adam, dict(lr=lr)),
num_mini_batch=num_mini_batch,
update_repeats=update_repeats,
max_grad_norm=max_grad_norm,
num_steps=num_steps,
named_losses={"ppo_loss": PPO(**PPOConfig)},
gamma=gamma,
use_gae=use_gae,
gae_lambda=gae_lambda,
advance_scene_rollout_period=cls.ADVANCE_SCENE_ROLLOUT_PERIOD,
pipeline_stages=[
PipelineStage(loss_names=["ppo_loss"], max_stage_steps=ppo_steps)
],
lr_scheduler_builder=Builder(
LambdaLR, {"lr_lambda": LinearDecay(steps=ppo_steps)}
),
)
def split_num_processes(self, ndevices):
assert self.NUM_PROCESSES >= ndevices, "NUM_PROCESSES {} < ndevices {}".format(
self.NUM_PROCESSES, ndevices
)
res = [0] * ndevices
for it in range(self.NUM_PROCESSES):
res[it % ndevices] += 1
return res
viz: Optional[VizSuite] = None
def get_viz(self, mode):
if self.viz is not None:
return self.viz
self.viz = VizSuite(
mode=mode,
# Basic 2D trajectory visualizer (task output source):
base_trajectory=MultiTrajectoryViz(), # plt_colormaps=["cool", "cool"]),
# Egocentric view visualizer (vector task source):
egeocentric=AgentViewViz(max_video_length=100, max_episodes_in_group=1),
# Specialized 2D trajectory visualizer (task output source):
thor_trajectory=ThorMultiViz(
figsize=(16, 8),
viz_rows_cols=(448, 448),
scenes=("FloorPlan_Train{}_{}", 1, 1, 1, 1),
),
)
return self.viz
def machine_params(self, mode="train", **kwargs):
visualizer = None
if mode == "train":
devices = (
["cpu"] if not torch.cuda.is_available() else list(self.TRAINING_GPUS)
)
nprocesses = (
4
if not torch.cuda.is_available()
else self.split_num_processes(len(devices))
)
elif mode == "valid":
nprocesses = 0
devices = ["cpu"] if not torch.cuda.is_available() else self.VALIDATION_GPUS
elif mode == "test":
nprocesses = 1
devices = ["cpu"] if not torch.cuda.is_available() else self.TESTING_GPUS
visualizer = self.get_viz(mode=mode)
else:
raise NotImplementedError("mode must be 'train', 'valid', or 'test'.")
return {
"nprocesses": nprocesses,
"devices": devices,
"visualizer": visualizer,
}
# TODO Define Model
@classmethod
def create_model(cls, **kwargs) -> nn.Module:
return NavToPartnerActorCriticSimpleConvRNN(
action_space=gym.spaces.Tuple(
[
gym.spaces.Discrete(len(NavToPartnerTask.class_action_names())),
gym.spaces.Discrete(len(NavToPartnerTask.class_action_names())),
]
),
observation_space=SensorSuite(cls.SENSORS).observation_spaces,
hidden_size=512,
)
# Define Task Sampler
@classmethod
def make_sampler_fn(cls, **kwargs) -> TaskSampler:
return NavToPartnerTaskSampler(**kwargs)
# Utility Functions for distributing scenes between GPUs
@staticmethod
def _partition_inds(n: int, num_parts: int):
return np.round(np.linspace(0, n, num_parts + 1, endpoint=True)).astype(
np.int32
)
def _get_sampler_args_for_scene_split(
self,
scenes: List[str],
process_ind: int,
total_processes: int,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
if total_processes > len(scenes): # oversample some scenes -> bias
if total_processes % len(scenes) != 0:
print(
"Warning: oversampling some of the scenes to feed all processes."
" You can avoid this by setting a number of workers divisible by the number of scenes"
)
scenes = scenes * int(ceil(total_processes / len(scenes)))
scenes = scenes[: total_processes * (len(scenes) // total_processes)]
else:
if len(scenes) % total_processes != 0:
print(
"Warning: oversampling some of the scenes to feed all processes."
" You can avoid this by setting a number of workers divisor of the number of scenes"
)
inds = self._partition_inds(len(scenes), total_processes)
return {
"scenes": scenes[inds[process_ind] : inds[process_ind + 1]],
"max_steps": self.MAX_STEPS,
"sensors": self.SENSORS,
"action_space": gym.spaces.Tuple(
[
gym.spaces.Discrete(len(NavToPartnerTask.class_action_names())),
gym.spaces.Discrete(len(NavToPartnerTask.class_action_names())),
]
),
"seed": seeds[process_ind] if seeds is not None else None,
"deterministic_cudnn": deterministic_cudnn,
"rewards_config": self.REWARD_CONFIG,
}
def train_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
scenes = ["FloorPlan_Train1_1"]
res = self._get_sampler_args_for_scene_split(
scenes,
process_ind,
total_processes,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
)
res["env_args"] = {
**self.ENV_ARGS,
"x_display": ("0.%d" % devices[process_ind % len(devices)])
if devices is not None and len(devices) > 0
else None,
}
return res
def valid_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
scenes = ["FloorPlan_Train1_1"]
res = self._get_sampler_args_for_scene_split(
scenes,
process_ind,
total_processes,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
)
res["env_args"] = {
**self.ENV_ARGS,
"x_display": ("0.%d" % devices[process_ind % len(devices)])
if devices is not None and len(devices) > 0
else None,
}
res["max_tasks"] = 20
return res
def test_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
scenes = ["FloorPlan_Train1_1"]
res = self._get_sampler_args_for_scene_split(
scenes,
process_ind,
total_processes,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
)
res["env_args"] = {
**self.ENV_ARGS,
"x_display": ("0.%d" % devices[process_ind % len(devices)])
if devices is not None and len(devices) > 0
else None,
}
res["max_tasks"] = 4
return res
|
allenact-main
|
projects/tutorials/navtopartner_robothor_rgb_ppo.py
|
# literate: tutorials/gym-tutorial.md
# %%
"""# Tutorial: OpenAI gym for continuous control."""
# %%
"""
**Note** The provided commands to execute in this tutorial assume you have
[installed the full library](../installation/installation-allenact.md#full-library) and the requirements for the
`gym_plugin`. The latter can be installed by
```bash
pip install -r allenact_plugins/gym_plugin/extra_requirements.txt
```
In this tutorial, we:
1. Introduce the `gym_plugin`, which enables some of the tasks in [OpenAI's gym](https://gym.openai.com/) for training
and inference within AllenAct.
1. Show an example of continuous control with an arbitrary action space covering 2 policies for one of the `gym` tasks.
## The task
For this tutorial, we'll focus on one of the continuous-control environments under the `Box2D` group of `gym`
environments: [LunarLanderContinuous-v2](https://gym.openai.com/envs/LunarLanderContinuous-v2/). In this task, the goal
is to smoothly land a lunar module in a landing pad, as shown below.
.
To achieve this goal, we need to provide continuous control for a main engine and directional one (2 real values). In
order to solve the task, the expected reward is of at least 200 points. The controls for main and directional engines
are both in the range [-1.0, 1.0] and the observation space is composed of 8 scalars indicating `x` and `y` positions,
`x` and `y` velocities, lander angle and angular velocity, and left and right ground contact. Note that these 8 scalars
provide a full observation of the state.
## Implementation
For this tutorial, we'll use the readily available `gym_plugin`, which includes a
[wrapper for `gym` environments](../api/allenact_plugins/gym_plugin/gym_environment.md#gymenvironment), a
[task sampler](../api/allenact_plugins/gym_plugin/gym_tasks.md#gymtasksampler) and
[task definition](../api/allenact_plugins/gym_plugin/gym_tasks.md#gymcontinuousbox2dtask), a
[sensor](../api/allenact_plugins/gym_plugin/gym_sensors.md#gymbox2dsensor) to wrap the observations provided by the `gym`
environment, and a simple [model](../api/allenact_plugins/gym_plugin/gym_models.md#memorylessactorcritic).
The experiment config, similar to the one used for the
[Navigation in MiniGrid tutorial](../tutorials/minigrid-tutorial.md), is defined as follows:
"""
# %%
from typing import Dict, Optional, List, Any, cast
import gym
import torch.nn as nn
import torch.optim as optim
from torch.optim.lr_scheduler import LambdaLR
from allenact.algorithms.onpolicy_sync.losses.ppo import PPO
from allenact.base_abstractions.experiment_config import ExperimentConfig, TaskSampler
from allenact.base_abstractions.sensor import SensorSuite
from allenact_plugins.gym_plugin.gym_models import MemorylessActorCritic
from allenact_plugins.gym_plugin.gym_sensors import GymBox2DSensor
from allenact_plugins.gym_plugin.gym_tasks import GymTaskSampler
from allenact.utils.experiment_utils import (
TrainingPipeline,
Builder,
PipelineStage,
LinearDecay,
)
from allenact.utils.viz_utils import VizSuite, AgentViewViz
class GymTutorialExperimentConfig(ExperimentConfig):
@classmethod
def tag(cls) -> str:
return "GymTutorial"
# %%
"""
### Sensors and Model
As mentioned above, we'll use a [GymBox2DSensor](../api/allenact_plugins/gym_plugin/gym_sensors.md#gymbox2dsensor) to provide
full observations from the state of the `gym` environment to our model.
"""
# %%
SENSORS = [
GymBox2DSensor("LunarLanderContinuous-v2", uuid="gym_box_data"),
]
# %%
"""
We define our `ActorCriticModel` agent using a lightweight implementation with separate MLPs for actors and critic,
[MemorylessActorCritic](../api/allenact_plugins/gym_plugin/gym_models.md#memorylessactorcritic). Since
this is a model for continuous control, note that the superclass of our model is `ActorCriticModel[GaussianDistr]`
instead of `ActorCriticModel[CategoricalDistr]`, since we'll use a
[Gaussian distribution](../api/allenact_plugins/gym_plugin/gym_distributions.md#gaussiandistr) to sample actions.
"""
# %%
@classmethod
def create_model(cls, **kwargs) -> nn.Module:
return MemorylessActorCritic(
input_uuid="gym_box_data",
action_space=gym.spaces.Box(
-1.0, 1.0, (2,)
), # 2 actors, each in the range [-1.0, 1.0]
observation_space=SensorSuite(cls.SENSORS).observation_spaces,
action_std=0.5,
)
# %%
"""
### Task samplers
We use an available `TaskSampler` implementation for `gym` environments that allows to sample
[GymTasks](../api/allenact_plugins/gym_plugin/gym_tasks.md#gymtask):
[GymTaskSampler](../api/allenact_plugins/gym_plugin/gym_tasks.md#gymtasksampler). Even though it is possible to let the task
sampler instantiate the proper sensor for the chosen task name (by passing `None`), we use the sensors we created
above, which contain a custom identifier for the actual observation space (`gym_box_data`) also used by the model.
"""
# %%
@classmethod
def make_sampler_fn(cls, **kwargs) -> TaskSampler:
return GymTaskSampler(**kwargs)
# %%
"""
For convenience, we will use a `_get_sampler_args` method to generate the task sampler arguments for all three
modes, `train, valid, test`:
"""
# %%
def train_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
return self._get_sampler_args(
process_ind=process_ind, mode="train", seeds=seeds
)
def valid_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
return self._get_sampler_args(
process_ind=process_ind, mode="valid", seeds=seeds
)
def test_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
return self._get_sampler_args(process_ind=process_ind, mode="test", seeds=seeds)
# %%
"""
Similarly to what we do in the Minigrid navigation tutorial, the task sampler samples random tasks for ever, while,
during testing (or validation), we sample a fixed number of tasks.
"""
# %%
def _get_sampler_args(
self, process_ind: int, mode: str, seeds: List[int]
) -> Dict[str, Any]:
"""Generate initialization arguments for train, valid, and test
TaskSamplers.
# Parameters
process_ind : index of the current task sampler
mode: one of `train`, `valid`, or `test`
"""
if mode == "train":
max_tasks = None # infinite training tasks
task_seeds_list = None # no predefined random seeds for training
deterministic_sampling = False # randomly sample tasks in training
else:
max_tasks = 3
# one seed for each task to sample:
# - ensures different seeds for each sampler, and
# - ensures a deterministic set of sampled tasks.
task_seeds_list = list(
range(process_ind * max_tasks, (process_ind + 1) * max_tasks)
)
deterministic_sampling = (
True # deterministically sample task in validation/testing
)
return dict(
gym_env_types=["LunarLanderContinuous-v2"],
sensors=self.SENSORS, # sensors used to return observations to the agent
max_tasks=max_tasks, # see above
task_seeds_list=task_seeds_list, # see above
deterministic_sampling=deterministic_sampling, # see above
seed=seeds[process_ind],
)
# %%
"""
Note that we just sample 3 tasks for validation and testing in this case, which suffice to illustrate the model's
success.
### Machine parameters
Given the simplicity of the task and model, we can just train the model on the CPU. During training, success should
reach 100% in less than 10 minutes, whereas solving the task (evaluation reward > 200) might take about 20 minutes
(on a laptop CPU).
We allocate a larger number of samplers for training (8) than for validation or testing (just 1), and we default to
CPU usage by returning an empty list of `devices`. We also include a video visualizer (`AgentViewViz`) in test mode.
"""
# %%
@classmethod
def machine_params(cls, mode="train", **kwargs) -> Dict[str, Any]:
visualizer = None
if mode == "test":
visualizer = VizSuite(
mode=mode,
video_viz=AgentViewViz(
label="episode_vid",
max_clip_length=400,
vector_task_source=("render", {"mode": "rgb_array"}),
fps=30,
),
)
return {
"nprocesses": 8 if mode == "train" else 1,
"devices": [],
"visualizer": visualizer,
}
# %%
"""
### Training pipeline
The last definition is the training pipeline. In this case, we use a PPO stage with linearly decaying learning rate
and 80 single-batch update repeats per rollout:
"""
# %%
@classmethod
def training_pipeline(cls, **kwargs) -> TrainingPipeline:
ppo_steps = int(1.2e6)
return TrainingPipeline(
named_losses=dict(
ppo_loss=PPO(clip_param=0.2, value_loss_coef=0.5, entropy_coef=0.0,),
), # type:ignore
pipeline_stages=[
PipelineStage(loss_names=["ppo_loss"], max_stage_steps=ppo_steps),
],
optimizer_builder=Builder(cast(optim.Optimizer, optim.Adam), dict(lr=1e-3)),
num_mini_batch=1,
update_repeats=80,
max_grad_norm=100,
num_steps=2000,
gamma=0.99,
use_gae=False,
gae_lambda=0.95,
advance_scene_rollout_period=None,
save_interval=200000,
metric_accumulate_interval=50000,
lr_scheduler_builder=Builder(
LambdaLR, {"lr_lambda": LinearDecay(steps=ppo_steps)}, # type:ignore
),
)
# %%
"""
## Training and validation
We have a complete implementation of this experiment's configuration class in `projects/tutorials/gym_tutorial.py`.
To start training from scratch, we just need to invoke
```bash
PYTHONPATH=. python allenact/main.py gym_tutorial -b projects/tutorials -m 8 -o /PATH/TO/gym_output -s 54321 -e
```
from the `allenact` root directory. Note that we include `-e` to enforce deterministic evaluation. Please refer to the
[Navigation in MiniGrid tutorial](../tutorials/minigrid-tutorial.md) if in doubt of the meaning of the rest of parameters.
If we have Tensorboard installed, we can track progress with
```bash
tensorboard --logdir /PATH/TO/gym_output
```
which will default to the URL [http://localhost:6006/](http://localhost:6006/).
After 1,200,000 steps, the script will terminate. If everything went well, the `valid` success rate should quickly
converge to 1 and the mean reward to above 250, while the average episode length should stay below or near 300.
## Testing
The training start date for the experiment, in `YYYY-MM-DD_HH-MM-SS` format, is used as the name of one of the
subfolders in the path to the checkpoints, saved under the output folder.
In order to evaluate (i.e. test) a collection of checkpoints, we need to pass the `--eval` flag and specify the
directory containing the checkpoints with the `--checkpoint CHECKPOINT_DIR` option:
```bash
PYTHONPATH=. python allenact/main.py gym_tutorial \
-b projects/tutorials \
-m 1 \
-o /PATH/TO/gym_output \
-s 54321 \
-e \
--eval \
--checkpoint /PATH/TO/gym_output/checkpoints/GymTutorial/YOUR_START_DATE \
--approx_ckpt_step_interval 800000 # Skip some checkpoints
```
The option `--approx_ckpt_step_interval 800000` tells AllenAct that we only want to evaluate checkpoints
which were saved every ~800000 steps, this lets us avoid evaluating every saved checkpoint. If everything went well,
the `test` success rate should converge to 1, the episode length below or near 300 steps, and the mean reward to above
250. The images tab in tensorboard will contain videos for the sampled test episodes.
.
If the test command fails with `pyglet.canvas.xlib.NoSuchDisplayException: Cannot connect to "None"`, e.g. when running
remotely, try prepending `DISPLAY=:0.0` to the command above, assuming you have an xserver running with such display
available:
```bash
DISPLAY=:0.0 PYTHONPATH=. python allenact/main.py gym_tutorial \
-b projects/tutorials \
-m 1 \
-o /PATH/TO/gym_output \
-s 54321 \
-e \
--eval \
--checkpoint /PATH/TO/gym_output/checkpoints/GymTutorial/YOUR_START_DATE \
--approx_ckpt_step_interval 800000
```
"""
|
allenact-main
|
projects/tutorials/gym_tutorial.py
|
# literate: tutorials/gym-mujoco-tutorial.md
# %%
"""# Tutorial: OpenAI gym MuJoCo environment."""
# %%
"""
**Note** The provided commands to execute in this tutorial assume you have
[installed the full library](../installation/installation-allenact.md#full-library) and the requirements for the
`gym_plugin`. The latter can be installed by
```bash
pip install -r allenact_plugins/gym_plugin/extra_requirements.txt
```
The environments for this tutorial use [MuJoCo](http://www.mujoco.org/)(**Mu**lti-**Jo**int dynamics in **Co**ntact)
physics simulator, which is also required to be installed properly with instructions
[here](https://github.com/openai/mujoco-py).
## The task
For this tutorial, we'll focus on one of the continuous-control environments under the `mujoco` group of `gym`
environments: [Ant-v2](https://gym.openai.com/envs/Ant-v2/). In this task, the goal
is to make a four-legged creature, "ant", walk forward as fast as possible. A random agent of "Ant-v2" is shown below.
.
To achieve the goal, we need to provide continuous control for the agent moving forward with four legs with the
`x` velocity as high as possible for at most 1000 episodes steps. The agent is failed, or done, if the `z` position
is out of the range [0.2, 1.0]. The dimension of the action space is 8 and 111 for the dimension of the observation
space that maps to different body parts, including 3D position `(x,y,z)`, orientation(quaternion `x`,`y`,`z`,`w`)
of the torso, and the joint angles, 3D velocity `(x,y,z)`, 3D angular velocity `(x,y,z)`, and joint velocities.
The rewards for the agent "ant" are composed of the forward rewards, healthy rewards, control cost, and contact cost.
## Implementation
For this tutorial, we'll use the readily available `gym_plugin`, which includes a
[wrapper for `gym` environments](../api/allenact_plugins/gym_plugin/gym_environment.md#gymenvironment), a
[task sampler](../api/allenact_plugins/gym_plugin/gym_tasks.md#gymtasksampler) and
[task definition](../api/allenact_plugins/gym_plugin/gym_tasks.md#gymcontinuousbox2dtask), a
[sensor](../api/allenact_plugins/gym_plugin/gym_sensors.md#gymbox2dsensor) to wrap the observations provided by the `gym`
environment, and a simple [model](../api/allenact_plugins/gym_plugin/gym_models.md#memorylessactorcritic).
The experiment config, similar to the one used for the
[Navigation in MiniGrid tutorial](../tutorials/minigrid-tutorial.md), is defined as follows:
"""
# %%
from typing import Dict, Optional, List, Any, cast
import gym
import torch.nn as nn
import torch.optim as optim
from torch.optim.lr_scheduler import LambdaLR
from allenact.algorithms.onpolicy_sync.losses.ppo import PPO
from allenact.base_abstractions.experiment_config import ExperimentConfig, TaskSampler
from allenact.base_abstractions.sensor import SensorSuite
from allenact_plugins.gym_plugin.gym_models import MemorylessActorCritic
from allenact_plugins.gym_plugin.gym_sensors import GymMuJoCoSensor
from allenact_plugins.gym_plugin.gym_tasks import GymTaskSampler
from allenact.utils.experiment_utils import (
TrainingPipeline,
Builder,
PipelineStage,
LinearDecay,
)
from allenact.utils.viz_utils import VizSuite, AgentViewViz
class HandManipulateTutorialExperimentConfig(ExperimentConfig):
@classmethod
def tag(cls) -> str:
return "GymMuJoCoTutorial"
# %%
"""
### Sensors and Model
As mentioned above, we'll use a [GymBox2DSensor](../api/allenact_plugins/gym_plugin/gym_sensors.md#gymbox2dsensor) to provide
full observations from the state of the `gym` environment to our model.
"""
# %%
SENSORS = [
GymMuJoCoSensor("Ant-v2", uuid="gym_mujoco_data"),
]
# %%
"""
We define our `ActorCriticModel` agent using a lightweight implementation with separate MLPs for actors and critic,
[MemorylessActorCritic](../api/allenact_plugins/gym_plugin/gym_models.md#memorylessactorcritic). Since
this is a model for continuous control, note that the superclass of our model is `ActorCriticModel[GaussianDistr]`
instead of `ActorCriticModel[CategoricalDistr]`, since we'll use a
[Gaussian distribution](../api/allenact_plugins/gym_plugin/gym_distributions.md#gaussiandistr) to sample actions.
"""
# %%
@classmethod
def create_model(cls, **kwargs) -> nn.Module:
"""We define our `ActorCriticModel` agent using a lightweight
implementation with separate MLPs for actors and critic,
MemorylessActorCritic.
Since this is a model for continuous control, note that the
superclass of our model is `ActorCriticModel[GaussianDistr]`
instead of `ActorCriticModel[CategoricalDistr]`, since we'll use
a Gaussian distribution to sample actions.
"""
return MemorylessActorCritic(
input_uuid="gym_mujoco_data",
action_space=gym.spaces.Box(
-3.0, 3.0, (8,), "float32"
), # 8 actors, each in the range [-3.0, 3.0]
observation_space=SensorSuite(cls.SENSORS).observation_spaces,
action_std=0.5,
)
# %%
"""
### Task samplers
We use an available `TaskSampler` implementation for `gym` environments that allows to sample
[GymTasks](../api/allenact_plugins/gym_plugin/gym_tasks.md#gymtask):
[GymTaskSampler](../api/allenact_plugins/gym_plugin/gym_tasks.md#gymtasksampler). Even though it is possible to let the task
sampler instantiate the proper sensor for the chosen task name (by passing `None`), we use the sensors we created
above, which contain a custom identifier for the actual observation space (`gym_mujoco_data`) also used by the model.
"""
# %%
@classmethod
def make_sampler_fn(cls, **kwargs) -> TaskSampler:
return GymTaskSampler(gym_env_type="Ant-v2", **kwargs)
# %%
"""
For convenience, we will use a `_get_sampler_args` method to generate the task sampler arguments for all three
modes, `train, valid, test`:
"""
# %%
def train_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
return self._get_sampler_args(
process_ind=process_ind, mode="train", seeds=seeds
)
def valid_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
return self._get_sampler_args(
process_ind=process_ind, mode="valid", seeds=seeds
)
def test_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
return self._get_sampler_args(process_ind=process_ind, mode="test", seeds=seeds)
# %%
"""
Similarly to what we do in the Minigrid navigation tutorial, the task sampler samples random tasks for ever, while,
during testing (or validation), we sample a fixed number of tasks.
"""
# %%
def _get_sampler_args(
self, process_ind: int, mode: str, seeds: List[int]
) -> Dict[str, Any]:
"""Generate initialization arguments for train, valid, and test
TaskSamplers.
# Parameters
process_ind : index of the current task sampler
mode: one of `train`, `valid`, or `test`
"""
if mode == "train":
max_tasks = None # infinite training tasks
task_seeds_list = None # no predefined random seeds for training
deterministic_sampling = False # randomly sample tasks in training
else:
max_tasks = 4
# one seed for each task to sample:
# - ensures different seeds for each sampler, and
# - ensures a deterministic set of sampled tasks.
task_seeds_list = list(
range(process_ind * max_tasks, (process_ind + 1) * max_tasks)
)
deterministic_sampling = (
True # deterministically sample task in validation/testing
)
return dict(
gym_env_types=["Ant-v2"],
sensors=self.SENSORS, # sensors used to return observations to the agent
max_tasks=max_tasks, # see above
task_seeds_list=task_seeds_list, # see above
deterministic_sampling=deterministic_sampling, # see above
seed=seeds[process_ind],
)
# %%
"""
Note that we just sample 4 tasks for validation and testing in this case, which suffice to illustrate the model's
success.
### Machine parameters
In this tutorial, we just train the model on the CPU. We allocate a larger number of samplers for training (8) than
for validation or testing (just 1), and we default to CPU usage by returning an empty list of `devices`. We also
include a video visualizer (`AgentViewViz`) in test mode.
"""
# %%
@classmethod
def machine_params(cls, mode="train", **kwargs) -> Dict[str, Any]:
visualizer = None
if mode == "test":
visualizer = VizSuite(
mode=mode,
video_viz=AgentViewViz(
label="episode_vid",
max_clip_length=400,
vector_task_source=("render", {"mode": "rgb_array"}),
fps=30,
),
)
return {
"nprocesses": 8 if mode == "train" else 1, # rollout
"devices": [],
"visualizer": visualizer,
}
# %%
"""
### Training pipeline
The last definition is the training pipeline. In this case, we use a PPO stage with linearly decaying learning rate
and 10 single-batch update repeats per rollout. The reward should exceed 4,000
in 20M steps in the test. In order to make the "ant" run with an obvious fast speed, we train the agents using PPO
with 3e7 steps.
"""
# %%
@classmethod
def training_pipeline(cls, **kwargs) -> TrainingPipeline:
lr = 3e-4
ppo_steps = int(3e7)
clip_param = 0.2
value_loss_coef = 0.5
entropy_coef = 0.0
num_mini_batch = 4 # optimal 64
update_repeats = 10
max_grad_norm = 0.5
num_steps = 2048
gamma = 0.99
use_gae = True
gae_lambda = 0.95
advance_scene_rollout_period = None
save_interval = 200000
metric_accumulate_interval = 50000
return TrainingPipeline(
named_losses=dict(
ppo_loss=PPO(
clip_param=clip_param,
value_loss_coef=value_loss_coef,
entropy_coef=entropy_coef,
),
), # type:ignore
pipeline_stages=[
PipelineStage(loss_names=["ppo_loss"], max_stage_steps=ppo_steps),
],
optimizer_builder=Builder(cast(optim.Optimizer, optim.Adam), dict(lr=lr)),
num_mini_batch=num_mini_batch,
update_repeats=update_repeats,
max_grad_norm=max_grad_norm,
num_steps=num_steps,
gamma=gamma,
use_gae=use_gae,
gae_lambda=gae_lambda,
advance_scene_rollout_period=advance_scene_rollout_period,
save_interval=save_interval,
metric_accumulate_interval=metric_accumulate_interval,
lr_scheduler_builder=Builder(
LambdaLR, {"lr_lambda": LinearDecay(steps=ppo_steps, startp=1, endp=0)},
),
)
# %%
"""
## Training and validation
We have a complete implementation of this experiment's configuration class in `projects/tutorials/gym_mujoco_tutorial.py`.
To start training from scratch, we just need to invoke
```bash
PYTHONPATH=. python allenact/main.py gym_mujoco_tutorial -b projects/tutorials -m 8 -o /PATH/TO/gym_mujoco_output -s 0 -e
```
from the `allenact` root directory. Note that we include `-e` to enforce deterministic evaluation. Please refer to the
[Navigation in MiniGrid tutorial](../tutorials/minigrid-tutorial.md) if in doubt of the meaning of the rest of parameters.
If we have Tensorboard installed, we can track progress with
```bash
tensorboard --logdir /PATH/TO/gym_mujoco_output
```
which will default to the URL [http://localhost:6006/](http://localhost:6006/).
After 30,000,000 steps, the script will terminate. If everything went well, the `valid` success rate should be 1
and the mean reward to above 4,000 in 20,000,000 steps, while the average episode length should stay or a
little below 1,000.
## Testing
The training start date for the experiment, in `YYYY-MM-DD_HH-MM-SS` format, is used as the name of one of the
subfolders in the path to the checkpoints, saved under the output folder.
In order to evaluate (i.e. test) a collection of checkpoints, we need to pass the `--eval` flag and specify the
directory containing the checkpoints with the `--checkpoint CHECKPOINT_DIR` option:
```bash
PYTHONPATH=. python allenact/main.py gym_mujoco_tutorial \
-b projects/tutorials \
-m 1 \
-o /PATH/TO/gym_mujoco_output \
-s 0 \
-e \
--eval \
--checkpoint /PATH/TO/gym_mujoco_output/checkpoints/GymMuJoCoTutorial/YOUR_START_DATE
```
If everything went well, the `test` success rate should converge to 1, the `test` success rate should be 1
and the mean reward to above 4,000 in 20,000,000 steps, while the average episode length should stay or a
little below 1,000. The `gif` results can be seen in the image tab of Tensorboard while testing.
The output should be something like this:
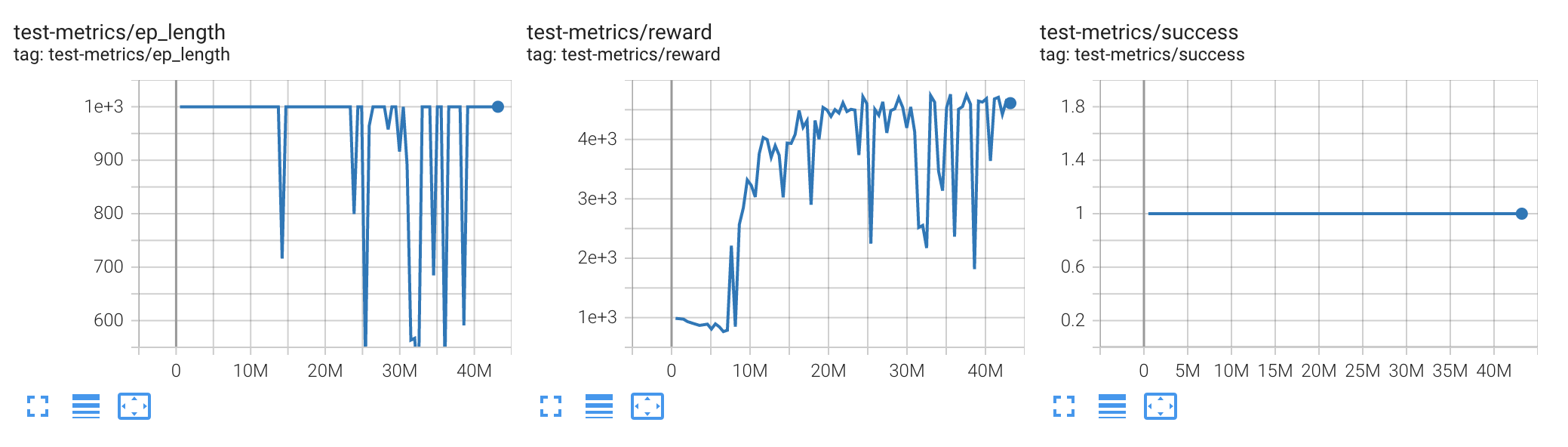.
And the `gif` results can be seen in the image tab of Tensorboard while testing.
If the test command fails with `pyglet.canvas.xlib.NoSuchDisplayException: Cannot connect to "None"`, e.g. when running
remotely, try prepending `DISPLAY=:0.0` to the command above, assuming you have an xserver running with such display
available:
```bash
DISPLAY=:0.0 PYTHONPATH=. python allenact/main.py gym_mujoco_tutorial \
-b projects/tutorials \
-m 1 \
-o /PATH/TO/gym_mujoco_output \
-s 0 \
-e \
--eval \
--checkpoint /PATH/TO/gym_mujoco_output/checkpoints/GymMuJoCoTutorial/YOUR_START_DATE
```
"""
|
allenact-main
|
projects/tutorials/gym_mujoco_tutorial.py
|
allenact-main
|
projects/tutorials/__init__.py
|
|
import glob
import os
from math import ceil
from typing import Dict, Any, List, Optional, Sequence
import gym
import numpy as np
import torch
import torch.nn as nn
import torch.optim as optim
from torch.optim.lr_scheduler import LambdaLR
from torchvision import models
from allenact.algorithms.onpolicy_sync.losses import PPO
from allenact.algorithms.onpolicy_sync.losses.ppo import PPOConfig
from allenact.base_abstractions.experiment_config import ExperimentConfig, MachineParams
from allenact.base_abstractions.preprocessor import SensorPreprocessorGraph
from allenact.base_abstractions.sensor import SensorSuite
from allenact.base_abstractions.task import TaskSampler
from allenact.embodiedai.preprocessors.resnet import ResNetPreprocessor
from allenact.utils.experiment_utils import (
Builder,
PipelineStage,
TrainingPipeline,
LinearDecay,
evenly_distribute_count_into_bins,
)
from allenact_plugins.ithor_plugin.ithor_sensors import RGBSensorThor
from allenact_plugins.navigation_plugin.objectnav.models import (
ResnetTensorNavActorCritic,
)
from allenact_plugins.robothor_plugin.robothor_sensors import GPSCompassSensorRoboThor
from allenact_plugins.robothor_plugin.robothor_task_samplers import (
PointNavDatasetTaskSampler,
)
from allenact_plugins.robothor_plugin.robothor_tasks import PointNavTask
class PointNaviThorRGBPPOExperimentConfig(ExperimentConfig):
"""A Point Navigation experiment configuration in iTHOR."""
# Task Parameters
MAX_STEPS = 500
REWARD_CONFIG = {
"step_penalty": -0.01,
"goal_success_reward": 10.0,
"failed_stop_reward": 0.0,
"shaping_weight": 1.0,
}
# Simulator Parameters
CAMERA_WIDTH = 640
CAMERA_HEIGHT = 480
SCREEN_SIZE = 224
# Training Engine Parameters
ADVANCE_SCENE_ROLLOUT_PERIOD: Optional[int] = None
NUM_PROCESSES = 60
TRAINING_GPUS = list(range(torch.cuda.device_count()))
VALIDATION_GPUS = [torch.cuda.device_count() - 1]
TESTING_GPUS = [torch.cuda.device_count() - 1]
# Dataset Parameters
TRAIN_DATASET_DIR = os.path.join(os.getcwd(), "datasets/ithor-objectnav/train")
VAL_DATASET_DIR = os.path.join(os.getcwd(), "datasets/ithor-objectnav/val")
SENSORS = [
RGBSensorThor(
height=SCREEN_SIZE,
width=SCREEN_SIZE,
use_resnet_normalization=True,
uuid="rgb_lowres",
),
GPSCompassSensorRoboThor(),
]
PREPROCESSORS = [
Builder(
ResNetPreprocessor,
{
"input_height": SCREEN_SIZE,
"input_width": SCREEN_SIZE,
"output_width": 7,
"output_height": 7,
"output_dims": 512,
"pool": False,
"torchvision_resnet_model": models.resnet18,
"input_uuids": ["rgb_lowres"],
"output_uuid": "rgb_resnet",
},
),
]
OBSERVATIONS = [
"rgb_resnet",
"target_coordinates_ind",
]
ENV_ARGS = dict(
width=CAMERA_WIDTH,
height=CAMERA_HEIGHT,
rotateStepDegrees=30.0,
visibilityDistance=1.0,
gridSize=0.25,
)
@classmethod
def tag(cls):
return "PointNavithorRGBPPO"
@classmethod
def training_pipeline(cls, **kwargs):
ppo_steps = int(250000000)
lr = 3e-4
num_mini_batch = 1
update_repeats = 3
num_steps = 30
save_interval = 5000000
log_interval = 10000
gamma = 0.99
use_gae = True
gae_lambda = 0.95
max_grad_norm = 0.5
return TrainingPipeline(
save_interval=save_interval,
metric_accumulate_interval=log_interval,
optimizer_builder=Builder(optim.Adam, dict(lr=lr)),
num_mini_batch=num_mini_batch,
update_repeats=update_repeats,
max_grad_norm=max_grad_norm,
num_steps=num_steps,
named_losses={"ppo_loss": PPO(**PPOConfig)},
gamma=gamma,
use_gae=use_gae,
gae_lambda=gae_lambda,
advance_scene_rollout_period=cls.ADVANCE_SCENE_ROLLOUT_PERIOD,
pipeline_stages=[
PipelineStage(loss_names=["ppo_loss"], max_stage_steps=ppo_steps)
],
lr_scheduler_builder=Builder(
LambdaLR, {"lr_lambda": LinearDecay(steps=ppo_steps)}
),
)
def machine_params(self, mode="train", **kwargs):
sampler_devices: Sequence[int] = []
if mode == "train":
workers_per_device = 1
gpu_ids = (
[]
if not torch.cuda.is_available()
else self.TRAINING_GPUS * workers_per_device
)
nprocesses = (
1
if not torch.cuda.is_available()
else evenly_distribute_count_into_bins(self.NUM_PROCESSES, len(gpu_ids))
)
sampler_devices = self.TRAINING_GPUS
elif mode == "valid":
nprocesses = 1
gpu_ids = [] if not torch.cuda.is_available() else self.VALIDATION_GPUS
elif mode == "test":
nprocesses = 1
gpu_ids = [] if not torch.cuda.is_available() else self.TESTING_GPUS
else:
raise NotImplementedError("mode must be 'train', 'valid', or 'test'.")
sensor_preprocessor_graph = (
SensorPreprocessorGraph(
source_observation_spaces=SensorSuite(self.SENSORS).observation_spaces,
preprocessors=self.PREPROCESSORS,
)
if mode == "train"
or (
(isinstance(nprocesses, int) and nprocesses > 0)
or (isinstance(nprocesses, Sequence) and sum(nprocesses) > 0)
)
else None
)
return MachineParams(
nprocesses=nprocesses,
devices=gpu_ids,
sampler_devices=sampler_devices
if mode == "train"
else gpu_ids, # ignored with > 1 gpu_ids
sensor_preprocessor_graph=sensor_preprocessor_graph,
)
# Define Model
@classmethod
def create_model(cls, **kwargs) -> nn.Module:
return ResnetTensorNavActorCritic(
action_space=gym.spaces.Discrete(len(PointNavTask.class_action_names())),
observation_space=kwargs["sensor_preprocessor_graph"].observation_spaces,
goal_sensor_uuid="target_coordinates_ind",
rgb_resnet_preprocessor_uuid="rgb_resnet",
hidden_size=512,
goal_dims=32,
)
# Define Task Sampler
@classmethod
def make_sampler_fn(cls, **kwargs) -> TaskSampler:
return PointNavDatasetTaskSampler(**kwargs)
# Utility Functions for distributing scenes between GPUs
@staticmethod
def _partition_inds(n: int, num_parts: int):
return np.round(np.linspace(0, n, num_parts + 1, endpoint=True)).astype(
np.int32
)
def _get_sampler_args_for_scene_split(
self,
scenes_dir: str,
process_ind: int,
total_processes: int,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
path = os.path.join(scenes_dir, "*.json.gz")
scenes = [scene.split("/")[-1].split(".")[0] for scene in glob.glob(path)]
if len(scenes) == 0:
raise RuntimeError(
(
"Could find no scene dataset information in directory {}."
" Are you sure you've downloaded them? "
" If not, see https://allenact.org/installation/download-datasets/ information"
" on how this can be done."
).format(scenes_dir)
)
if total_processes > len(scenes): # oversample some scenes -> bias
if total_processes % len(scenes) != 0:
print(
"Warning: oversampling some of the scenes to feed all processes."
" You can avoid this by setting a number of workers divisible by the number of scenes"
)
scenes = scenes * int(ceil(total_processes / len(scenes)))
scenes = scenes[: total_processes * (len(scenes) // total_processes)]
else:
if len(scenes) % total_processes != 0:
print(
"Warning: oversampling some of the scenes to feed all processes."
" You can avoid this by setting a number of workers divisor of the number of scenes"
)
inds = self._partition_inds(len(scenes), total_processes)
return {
"scenes": scenes[inds[process_ind] : inds[process_ind + 1]],
"max_steps": self.MAX_STEPS,
"sensors": self.SENSORS,
"action_space": gym.spaces.Discrete(len(PointNavTask.class_action_names())),
"seed": seeds[process_ind] if seeds is not None else None,
"deterministic_cudnn": deterministic_cudnn,
"rewards_config": self.REWARD_CONFIG,
}
def train_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
res = self._get_sampler_args_for_scene_split(
os.path.join(self.TRAIN_DATASET_DIR, "episodes"),
process_ind,
total_processes,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
)
res["scene_directory"] = self.TRAIN_DATASET_DIR
res["loop_dataset"] = True
res["env_args"] = {}
res["env_args"].update(self.ENV_ARGS)
res["env_args"]["x_display"] = (
("0.%d" % devices[process_ind % len(devices)])
if devices is not None and len(devices) > 0
else None
)
res["allow_flipping"] = True
return res
def valid_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
res = self._get_sampler_args_for_scene_split(
os.path.join(self.VAL_DATASET_DIR, "episodes"),
process_ind,
total_processes,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
)
res["scene_directory"] = self.VAL_DATASET_DIR
res["loop_dataset"] = False
res["env_args"] = {}
res["env_args"].update(self.ENV_ARGS)
res["env_args"]["x_display"] = (
("0.%d" % devices[process_ind % len(devices)])
if devices is not None and len(devices) > 0
else None
)
return res
def test_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
res = self._get_sampler_args_for_scene_split(
os.path.join(self.VAL_DATASET_DIR, "episodes"),
process_ind,
total_processes,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
)
res["scene_directory"] = self.VAL_DATASET_DIR
res["loop_dataset"] = False
res["env_args"] = {}
res["env_args"].update(self.ENV_ARGS)
return res
|
allenact-main
|
projects/tutorials/pointnav_ithor_rgb_ddppo.py
|
from projects.tutorials.object_nav_ithor_dagger_then_ppo_one_object import (
ObjectNavThorDaggerThenPPOExperimentConfig,
)
from allenact.utils.viz_utils import (
VizSuite,
TrajectoryViz,
AgentViewViz,
ActorViz,
TensorViz1D,
)
from allenact_plugins.ithor_plugin.ithor_viz import ThorViz
class ObjectNavThorDaggerThenPPOVizExperimentConfig(
ObjectNavThorDaggerThenPPOExperimentConfig
):
"""A simple object navigation experiment in THOR.
Training with DAgger and then PPO + using viz for test.
"""
TEST_SAMPLES_IN_SCENE = 4
@classmethod
def tag(cls):
return "ObjectNavThorDaggerThenPPOViz"
viz = None
def get_viz(self, mode):
if self.viz is not None:
return self.viz
self.viz = VizSuite(
mode=mode,
base_trajectory=TrajectoryViz(
path_to_target_location=None, path_to_rot_degrees=("rotation",),
),
egeocentric=AgentViewViz(max_video_length=100),
action_probs=ActorViz(figsize=(3.25, 10), fontsize=18),
taken_action_logprobs=TensorViz1D(),
episode_mask=TensorViz1D(rollout_source=("masks",)),
thor_trajectory=ThorViz(
path_to_target_location=None, figsize=(8, 8), viz_rows_cols=(448, 448),
),
)
return self.viz
def machine_params(self, mode="train", **kwargs):
params = super().machine_params(mode, **kwargs)
if mode == "test":
params.set_visualizer(self.get_viz(mode))
return params
|
allenact-main
|
projects/tutorials/object_nav_ithor_dagger_then_ppo_one_object_viz.py
|
# literate: tutorials/training-a-pointnav-model.md
# %%
"""# Tutorial: PointNav in RoboTHOR."""
# %%
"""

## Introduction
One of the most obvious tasks that an embodied agent should master is navigating the world it inhabits.
Before we can teach a robot to cook or clean it first needs to be able to move around. The simplest
way to formulate "moving around" into a task is by making your agent find a beacon somewhere in the environment.
This beacon transmits its location, such that at any time, the agent can get the direction and euclidian distance
to the beacon. This particular task is often called Point Navigation, or **PointNav** for short.
#### PointNav
At first glance, this task seems trivial. If the agent is given the direction and distance of the target at
all times, can it not simply follow this signal directly? The answer is no, because agents are often trained
on this task in environments that emulate real-world buildings which are not wide-open spaces, but rather
contain many smaller rooms. Because of this, the agent has to learn to navigate human spaces and use doors
and hallways to efficiently navigate from one side of the building to the other. This task becomes particularly
difficult when the agent is tested in an environment that it is not trained in. If the agent does not know
how the floor plan of an environment looks, it has to learn to predict the design of man-made structures,
to efficiently navigate across them, much like how people instinctively know how to move around a building
they have never seen before based on their experience navigating similar buildings.
#### What is an environment anyways?
Environments are worlds in which embodied agents exist. If our embodied agent is simply a neural network that is being
trained in a simulator, then that simulator is its environment. Similarly, if our agent is a
physical robot then its environment is the real world. The agent interacts with the environment by taking one
of several available actions (such as "move forward", or "turn left"). After each action, the environment
produces a new frame that the agent can analyze to determine its next step. For many tasks, including PointNav
the agent also has a special "stop" action which indicates that the agent thinks it has reached the target.
After this action is called the agent will be reset to a new location, regardless if it reached the
target. The hope is that after enough training the agent will learn to correctly assess that it has successfully
navigated to the target.

There are many simulators designed for the training
of embodied agents. In this tutorial, we will be using a simulator called [RoboTHOR](https://ai2thor.allenai.org/robothor/),
which is designed specifically to train models that can easily be transferred to a real robot, by providing a
photo-realistic virtual environment and a real-world replica of the environment that researchers can have access to.
RoboTHOR contains 60 different virtual scenes with different floor plans and furniture and 15 validation scenes.
It is also important to mention that **AllenAct**
has a class abstraction called Environment. This is not the actual simulator game engine or robotics controller,
but rather a shallow wrapper that provides a uniform interface to the actual environment.
#### Learning algorithm
Finally, let us briefly touch on the algorithm that we will use to train our embodied agent to navigate. While
*AllenAct* offers us great flexibility to train models using complex pipelines, we will be using a simple
pure reinforcement learning approach for this tutorial. More specifically, we will be using DD-PPO,
a decentralized and distributed variant of the ubiquitous PPO algorithm. For those unfamiliar with Reinforcement
Learning we highly recommend [this tutorial](http://karpathy.github.io/2016/05/31/rl/) by Andrej Karpathy, and [this
book](http://www.incompleteideas.net/book/the-book-2nd.html) by Sutton and Barto. Essentially what we are doing
is letting our agent explore the environment on its own, rewarding it for taking actions that bring it closer
to its goal and penalizing it for actions that take it away from its goal. We then optimize the agent's model
to maximize this reward.
## Requirements
To train the model on the PointNav task, we need to [install the RoboTHOR environment](../installation/installation-framework.md)
and [download the RoboTHOR PointNav dataset](../installation/download-datasets.md)
The dataset contains a list of episodes with thousands of randomly generated starting positions and target locations for each of the scenes
as well as a precomputed cache of distances, containing the shortest path from each point in a scene, to every other point in that scene.
This is used to reward the agent for moving closer to the target in terms of geodesic distance - the actual path distance (as opposed to a
straight line distance).
## Config File Setup
Now comes the most important part of the tutorial, we are going to write an experiment config file.
If this is your first experience with experiment config files in AllenAct, we suggest that you
first see our how-to on [defining an experiment](../howtos/defining-an-experiment.md) which will
walk you through creating a simplified experiment config file.
Unlike a library that can be imported into python, **AllenAct** is structured as a framework with a runner script called
`main.py` which will run the experiment specified in a config file. This design forces us to keep meticulous records of
exactly which settings were used to produce a particular result,
which can be very useful given how expensive RL models are to train.
The `projects/` directory is home to different projects using `AllenAct`. Currently it is populated with baselines
of popular tasks and tutorials.
We already have all the code for this tutorial stored in `projects/tutorials/training_a_pointnav_model.py`. We will
be using this file to run our experiments, but you can create a new directory in `projects/` and start writing your
experiment there.
We start off by importing everything we will need:
"""
# %%
import glob
import os
from math import ceil
from typing import Dict, Any, List, Optional, Sequence
import gym
import numpy as np
import torch
import torch.nn as nn
import torch.optim as optim
from torch.optim.lr_scheduler import LambdaLR
from torchvision import models
from allenact.algorithms.onpolicy_sync.losses import PPO
from allenact.algorithms.onpolicy_sync.losses.ppo import PPOConfig
from allenact.base_abstractions.experiment_config import ExperimentConfig, MachineParams
from allenact.base_abstractions.preprocessor import SensorPreprocessorGraph
from allenact.base_abstractions.sensor import SensorSuite
from allenact.base_abstractions.task import TaskSampler
from allenact.embodiedai.preprocessors.resnet import ResNetPreprocessor
from allenact.utils.experiment_utils import (
Builder,
PipelineStage,
TrainingPipeline,
LinearDecay,
evenly_distribute_count_into_bins,
)
from allenact_plugins.ithor_plugin.ithor_sensors import RGBSensorThor
from allenact_plugins.navigation_plugin.objectnav.models import (
ResnetTensorNavActorCritic,
)
from allenact_plugins.robothor_plugin.robothor_sensors import GPSCompassSensorRoboThor
from allenact_plugins.robothor_plugin.robothor_task_samplers import (
PointNavDatasetTaskSampler,
)
from allenact_plugins.robothor_plugin.robothor_tasks import PointNavTask
# %%
"""Next we define a new experiment config class:"""
# %%
class PointNavRoboThorRGBPPOExperimentConfig(ExperimentConfig):
"""A Point Navigation experiment configuration in RoboThor."""
# %%
"""
We then define the task parameters. For PointNav, these include the maximum number of steps our agent
can take before being reset (this prevents the agent from wandering on forever), and a configuration
for the reward function that we will be using.
"""
# %%
# Task Parameters
MAX_STEPS = 500
REWARD_CONFIG = {
"step_penalty": -0.01,
"goal_success_reward": 10.0,
"failed_stop_reward": 0.0,
"shaping_weight": 1.0,
}
# %%
"""
In this case, we set the maximum number of steps to 500.
We give the agent a reward of -0.01 for each action that it takes (this is to encourage it to reach the goal
in as few actions as possible), and a reward of 10.0 if the agent manages to successfully reach its destination.
If the agent selects the `stop` action without reaching the target we do not punish it (although this is
sometimes useful for preventing the agent from stopping prematurely). Finally, our agent gets rewarded if it moves
closer to the target and gets punished if it moves further away. `shaping_weight` controls how strong this signal should
be and is here set to 1.0. These parameters work well for training an agent on PointNav, but feel free to play around
with them.
Next, we set the parameters of the simulator itself. Here we select a resolution at which the engine will render
every frame (640 by 480) and a resolution at which the image will be fed into the neural network (here it is set
to a 224 by 224 box).
"""
# %%
# Simulator Parameters
CAMERA_WIDTH = 640
CAMERA_HEIGHT = 480
SCREEN_SIZE = 224
# %%
"""
Next, we set the hardware parameters for the training engine. `NUM_PROCESSES` sets the total number of parallel
processes that will be used to train the model. In general, more processes result in faster training,
but since each process is a unique instance of the environment in which we are training they can take up a
lot of memory. Depending on the size of the model, the environment, and the hardware we are using, we may
need to adjust this number, but for a setup with 8 GTX Titans, 60 processes work fine. 60 also happens to
be the number of training scenes in RoboTHOR, which allows each process to load only a single scene into
memory, saving time and space.
`TRAINING_GPUS` takes the ids of the GPUS on which
the model should be trained. Similarly `VALIDATION_GPUS` and `TESTING_GPUS` hold the ids of the GPUS on which
the validation and testing will occur. During training, a validation process is constantly running and evaluating
the current model, to show the progress on the validation set, so reserving a GPU for validation can be a good idea.
If our hardware setup does not include a GPU, these fields can be set to empty lists, as the codebase will default
to running everything on the CPU with only 1 process.
"""
# %%
ADVANCE_SCENE_ROLLOUT_PERIOD: Optional[int] = None
NUM_PROCESSES = 20
TRAINING_GPUS: Sequence[int] = [0]
VALIDATION_GPUS: Sequence[int] = [0]
TESTING_GPUS: Sequence[int] = [0]
# %%
"""
Since we are using a dataset to train our model we need to define the path to where we have stored it. If we
download the dataset instructed above we can define the path as follows
"""
# %%
TRAIN_DATASET_DIR = os.path.join(os.getcwd(), "datasets/robothor-pointnav/debug")
VAL_DATASET_DIR = os.path.join(os.getcwd(), "datasets/robothor-pointnav/debug")
# %%
"""
Next, we define the sensors. `RGBSensorThor` is the environment's implementation of an RGB sensor. It takes the
raw image outputted by the simulator and resizes it, to the input dimensions for our neural network that we
specified above. It also performs normalization if we want. `GPSCompassSensorRoboThor` is a sensor that tracks
the point our agent needs to move to. It tells us the direction and distance to our goal at every time step.
"""
# %%
SENSORS = [
RGBSensorThor(
height=SCREEN_SIZE,
width=SCREEN_SIZE,
use_resnet_normalization=True,
uuid="rgb_lowres",
),
GPSCompassSensorRoboThor(),
]
# %%
"""
For the sake of this example, we are also going to be using a preprocessor with our model. In *AllenAct*
the preprocessor abstraction is designed with large models with frozen weights in mind. These models often
hail from the ResNet family and transform the raw pixels that our agent observes in the environment, into a
complex embedding, which then gets stored and used as input to our trainable model instead of the original image.
Most other preprocessing work is done in the sensor classes (as we just saw with the RGB
sensor scaling and normalizing our input), but for the sake of efficiency, all neural network preprocessing should
use this abstraction.
"""
# %%
PREPROCESSORS = [
Builder(
ResNetPreprocessor,
{
"input_height": SCREEN_SIZE,
"input_width": SCREEN_SIZE,
"output_width": 7,
"output_height": 7,
"output_dims": 512,
"pool": False,
"torchvision_resnet_model": models.resnet18,
"input_uuids": ["rgb_lowres"],
"output_uuid": "rgb_resnet",
},
),
]
# %%
"""
Next, we must define all of the observation inputs that our model will use. These are just
the hardcoded ids of the sensors we are using in the experiment.
"""
# %%
OBSERVATIONS = [
"rgb_resnet",
"target_coordinates_ind",
]
# %%
"""
Finally, we must define the settings of our simulator. We set the camera dimensions to the values
we defined earlier. We set rotateStepDegrees to 30 degrees, which means that every time the agent takes a
turn action, they will rotate by 30 degrees. We set grid size to 0.25 which means that every time the
agent moves forward, it will do so by 0.25 meters.
"""
# %%
ENV_ARGS = dict(
width=CAMERA_WIDTH,
height=CAMERA_HEIGHT,
rotateStepDegrees=30.0,
visibilityDistance=1.0,
gridSize=0.25,
agentMode="bot",
)
# %%
"""
Now we move on to the methods that we must define to finish implementing an experiment config. Firstly we
have a simple method that just returns the name of the experiment.
"""
# %%
@classmethod
def tag(cls):
return "PointNavRobothorRGBPPO"
# %%
"""
Next, we define the training pipeline. In this function, we specify exactly which algorithm or algorithms
we will use to train our model. In this simple example, we are using the PPO loss with a learning rate of 3e-4.
We specify 250 million steps of training and a rollout length of 30 with the `ppo_steps` and `num_steps` parameters
respectively. All the other standard PPO parameters are also present in this function. `metric_accumulate_interval`
sets the frequency at which data is accumulated from all the processes and logged while `save_interval` sets how
often we save the model weights and run validation on them.
"""
# %%
@classmethod
def training_pipeline(cls, **kwargs):
ppo_steps = int(250000000)
lr = 3e-4
num_mini_batch = 1
update_repeats = 3
num_steps = 30
save_interval = 5000000
log_interval = 1000
gamma = 0.99
use_gae = True
gae_lambda = 0.95
max_grad_norm = 0.5
return TrainingPipeline(
save_interval=save_interval,
metric_accumulate_interval=log_interval,
optimizer_builder=Builder(optim.Adam, dict(lr=lr)),
num_mini_batch=num_mini_batch,
update_repeats=update_repeats,
max_grad_norm=max_grad_norm,
num_steps=num_steps,
named_losses={"ppo_loss": PPO(**PPOConfig)},
gamma=gamma,
use_gae=use_gae,
gae_lambda=gae_lambda,
advance_scene_rollout_period=cls.ADVANCE_SCENE_ROLLOUT_PERIOD,
pipeline_stages=[
PipelineStage(loss_names=["ppo_loss"], max_stage_steps=ppo_steps)
],
lr_scheduler_builder=Builder(
LambdaLR, {"lr_lambda": LinearDecay(steps=ppo_steps)}
),
)
# %%
"""
The `machine_params` method returns the hardware parameters of each
process, based on the list of devices we defined above.
"""
# %%
def machine_params(self, mode="train", **kwargs):
sampler_devices: List[int] = []
if mode == "train":
workers_per_device = 1
gpu_ids = (
[]
if not torch.cuda.is_available()
else list(self.TRAINING_GPUS) * workers_per_device
)
nprocesses = (
8
if not torch.cuda.is_available()
else evenly_distribute_count_into_bins(self.NUM_PROCESSES, len(gpu_ids))
)
sampler_devices = list(self.TRAINING_GPUS)
elif mode == "valid":
nprocesses = 1
gpu_ids = [] if not torch.cuda.is_available() else self.VALIDATION_GPUS
elif mode == "test":
nprocesses = 1
gpu_ids = [] if not torch.cuda.is_available() else self.TESTING_GPUS
else:
raise NotImplementedError("mode must be 'train', 'valid', or 'test'.")
sensor_preprocessor_graph = (
SensorPreprocessorGraph(
source_observation_spaces=SensorSuite(self.SENSORS).observation_spaces,
preprocessors=self.PREPROCESSORS,
)
if mode == "train"
or (
(isinstance(nprocesses, int) and nprocesses > 0)
or (isinstance(nprocesses, Sequence) and sum(nprocesses) > 0)
)
else None
)
return MachineParams(
nprocesses=nprocesses,
devices=gpu_ids,
sampler_devices=sampler_devices
if mode == "train"
else gpu_ids, # ignored with > 1 gpu_ids
sensor_preprocessor_graph=sensor_preprocessor_graph,
)
# %%
"""
Now we define the actual model that we will be using. **AllenAct** offers first-class support for PyTorch,
so any PyTorch model that implements the provided `ActorCriticModel` class will work here. Here we borrow a modelfrom the `pointnav_baselines` project (which
unsurprisingly contains several PointNav baselines). It is a small convolutional network that expects the output of a ResNet as its rgb input followed by a single-layered GRU. The model accepts as input the number of different
actions our agent can perform in the environment through the `action_space` parameter, which we get from the task definition. We also define the shape of the inputs we are going to be passing to the model with `observation_space`
We specify the names of our sensors with `goal_sensor_uuid` and `rgb_resnet_preprocessor_uuid`. Finally, we define
the size of our RNN with `hidden_layer` and the size of the embedding of our goal sensor data (the direction and
distance to the target) with `goal_dims`.
"""
# %%
@classmethod
def create_model(cls, **kwargs) -> nn.Module:
return ResnetTensorNavActorCritic(
action_space=gym.spaces.Discrete(len(PointNavTask.class_action_names())),
observation_space=kwargs["sensor_preprocessor_graph"].observation_spaces,
goal_sensor_uuid="target_coordinates_ind",
rgb_resnet_preprocessor_uuid="rgb_resnet",
hidden_size=512,
goal_dims=32,
)
# %%
"""
We also need to define the task sampler that we will be using. This is a piece of code that generates instances
of tasks for our agent to perform (essentially starting locations and targets for PointNav). Since we are getting
our tasks from a dataset, the task sampler is a very simple code that just reads the specified file and sets
the agent to the next starting locations whenever the agent exceeds the maximum number of steps or selects the
`stop` action.
"""
# %%
@classmethod
def make_sampler_fn(cls, **kwargs) -> TaskSampler:
return PointNavDatasetTaskSampler(**kwargs)
# %%
"""
You might notice that we did not specify the task sampler's arguments, but are rather passing them in. The
reason for this is that each process will have its own task sampler, and we need to specify exactly which scenes
each process should work with. If we have several GPUS and many scenes this process of distributing the work can be rather complicated so we define a few helper functions to do just this.
"""
# %%
@staticmethod
def _partition_inds(n: int, num_parts: int):
return np.round(np.linspace(0, n, num_parts + 1, endpoint=True)).astype(
np.int32
)
def _get_sampler_args_for_scene_split(
self,
scenes_dir: str,
process_ind: int,
total_processes: int,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
path = os.path.join(scenes_dir, "*.json.gz")
scenes = [scene.split("/")[-1].split(".")[0] for scene in glob.glob(path)]
if len(scenes) == 0:
raise RuntimeError(
(
"Could find no scene dataset information in directory {}."
" Are you sure you've downloaded them? "
" If not, see https://allenact.org/installation/download-datasets/ information"
" on how this can be done."
).format(scenes_dir)
)
if total_processes > len(scenes): # oversample some scenes -> bias
if total_processes % len(scenes) != 0:
print(
"Warning: oversampling some of the scenes to feed all processes."
" You can avoid this by setting a number of workers divisible by the number of scenes"
)
scenes = scenes * int(ceil(total_processes / len(scenes)))
scenes = scenes[: total_processes * (len(scenes) // total_processes)]
else:
if len(scenes) % total_processes != 0:
print(
"Warning: oversampling some of the scenes to feed all processes."
" You can avoid this by setting a number of workers divisor of the number of scenes"
)
inds = self._partition_inds(len(scenes), total_processes)
return {
"scenes": scenes[inds[process_ind] : inds[process_ind + 1]],
"max_steps": self.MAX_STEPS,
"sensors": self.SENSORS,
"action_space": gym.spaces.Discrete(len(PointNavTask.class_action_names())),
"seed": seeds[process_ind] if seeds is not None else None,
"deterministic_cudnn": deterministic_cudnn,
"rewards_config": self.REWARD_CONFIG,
}
# %%
"""
The very last things we need to define are the sampler arguments themselves. We define them separately for a train,
validation, and test sampler, but in this case, they are almost the same. The arguments need to include the location
of the dataset and distance cache as well as the environment arguments for our simulator, both of which we defined above
and are just referencing here. The only consequential differences between these task samplers are the path to the dataset
we are using (train or validation) and whether we want to loop over the dataset or not (we want this for training since
we want to train for several epochs, but we do not need this for validation and testing). Since the test scenes of
RoboTHOR are private we are also testing on our validation set.
"""
# %%
def train_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
res = self._get_sampler_args_for_scene_split(
os.path.join(self.TRAIN_DATASET_DIR, "episodes"),
process_ind,
total_processes,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
)
res["scene_directory"] = self.TRAIN_DATASET_DIR
res["loop_dataset"] = True
res["env_args"] = {}
res["env_args"].update(self.ENV_ARGS)
res["env_args"]["x_display"] = (
("0.%d" % devices[process_ind % len(devices)])
if devices is not None and len(devices) > 0
else None
)
res["allow_flipping"] = True
return res
def valid_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
res = self._get_sampler_args_for_scene_split(
os.path.join(self.VAL_DATASET_DIR, "episodes"),
process_ind,
total_processes,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
)
res["scene_directory"] = self.VAL_DATASET_DIR
res["loop_dataset"] = False
res["env_args"] = {}
res["env_args"].update(self.ENV_ARGS)
res["env_args"]["x_display"] = (
("0.%d" % devices[process_ind % len(devices)])
if devices is not None and len(devices) > 0
else None
)
return res
def test_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
res = self._get_sampler_args_for_scene_split(
os.path.join(self.VAL_DATASET_DIR, "episodes"),
process_ind,
total_processes,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
)
res["scene_directory"] = self.VAL_DATASET_DIR
res["loop_dataset"] = False
res["env_args"] = {}
res["env_args"].update(self.ENV_ARGS)
return res
# %%
"""
This is it! If we copy all of the code into a file we should be able to run our experiment!
## Training Model On Debug Dataset
We can test if our installation worked properly by training our model on a small dataset of 4 episodes. This
should take about 20 minutes on a computer with a NVIDIA GPU.
We can now train a model by running:
```bash
PYTHONPATH=. python allenact/main.py -o <PATH_TO_OUTPUT> -c -b <BASE_DIRECTORY_OF_YOUR_EXPERIMENT> <EXPERIMENT_NAME>
```
If using the same configuration as we have set up, the following command should work:
```bash
PYTHONPATH=. python allenact/main.py training_a_pointnav_model -o storage/robothor-pointnav-rgb-resnet-resnet -b projects/tutorials
```
If we start up a tensorboard server during training and specify that `output_dir=storage` the output should look
something like this:

## Training Model On Full Dataset
We can also train the model on the full dataset by changing back our dataset path and running the same command as above.
But be aware, training this takes nearly 2 days on a machine with 8 GPU.
## Testing Model
To test the performance of a model please refer to [this tutorial](running-inference-on-a-pretrained-model.md).
## Conclusion
In this tutorial, we learned how to create a new PointNav experiment using **AllenAct**. There are many simple
and obvious ways to modify the experiment from here - changing the model, the learning algorithm and the environment
each requires very few lines of code changed in the above file, allowing us to explore our embodied ai research ideas
across different frameworks with ease.
"""
|
allenact-main
|
projects/tutorials/training_a_pointnav_model.py
|
from math import ceil
from typing import Dict, Any, List, Optional
import gym
import numpy as np
import torch
import torch.nn as nn
import torch.optim as optim
from torch.optim.lr_scheduler import LambdaLR
from allenact.algorithms.onpolicy_sync.losses import PPO
from allenact.algorithms.onpolicy_sync.losses.ppo import PPOConfig
from allenact.base_abstractions.experiment_config import ExperimentConfig, MachineParams
from allenact.base_abstractions.sensor import SensorSuite
from allenact.base_abstractions.task import TaskSampler
from allenact.utils.experiment_utils import (
Builder,
PipelineStage,
TrainingPipeline,
LinearDecay,
)
from allenact_plugins.ithor_plugin.ithor_sensors import (
RGBSensorThor,
GoalObjectTypeThorSensor,
)
from allenact_plugins.ithor_plugin.ithor_task_samplers import ObjectNavTaskSampler
from allenact_plugins.ithor_plugin.ithor_tasks import ObjectNaviThorGridTask
from allenact_plugins.navigation_plugin.objectnav.models import ObjectNavActorCritic
class ObjectNavThorPPOExperimentConfig(ExperimentConfig):
"""A simple object navigation experiment in THOR.
Training with PPO.
"""
# A simple setting, train/valid/test are all the same single scene
# and we're looking for a single object
OBJECT_TYPES = ["Tomato"]
TRAIN_SCENES = ["FloorPlan1_physics"]
VALID_SCENES = ["FloorPlan1_physics"]
TEST_SCENES = ["FloorPlan1_physics"]
# Setting up sensors and basic environment details
SCREEN_SIZE = 224
SENSORS = [
RGBSensorThor(
height=SCREEN_SIZE, width=SCREEN_SIZE, use_resnet_normalization=True,
),
GoalObjectTypeThorSensor(object_types=OBJECT_TYPES),
]
ENV_ARGS = {
"player_screen_height": SCREEN_SIZE,
"player_screen_width": SCREEN_SIZE,
"quality": "Very Low",
}
MAX_STEPS = 128
ADVANCE_SCENE_ROLLOUT_PERIOD: Optional[int] = None
VALID_SAMPLES_IN_SCENE = 10
TEST_SAMPLES_IN_SCENE = 100
@classmethod
def tag(cls):
return "ObjectNavThorPPO"
@classmethod
def training_pipeline(cls, **kwargs):
ppo_steps = int(1e6)
lr = 2.5e-4
num_mini_batch = 2 if not torch.cuda.is_available() else 6
update_repeats = 4
num_steps = 128
metric_accumulate_interval = cls.MAX_STEPS * 10 # Log every 10 max length tasks
save_interval = 10000
gamma = 0.99
use_gae = True
gae_lambda = 1.0
max_grad_norm = 0.5
return TrainingPipeline(
save_interval=save_interval,
metric_accumulate_interval=metric_accumulate_interval,
optimizer_builder=Builder(optim.Adam, dict(lr=lr)),
num_mini_batch=num_mini_batch,
update_repeats=update_repeats,
max_grad_norm=max_grad_norm,
num_steps=num_steps,
named_losses={
"ppo_loss": PPO(clip_decay=LinearDecay(ppo_steps), **PPOConfig),
},
gamma=gamma,
use_gae=use_gae,
gae_lambda=gae_lambda,
advance_scene_rollout_period=cls.ADVANCE_SCENE_ROLLOUT_PERIOD,
pipeline_stages=[
PipelineStage(loss_names=["ppo_loss"], max_stage_steps=ppo_steps,),
],
lr_scheduler_builder=Builder(
LambdaLR, {"lr_lambda": LinearDecay(steps=ppo_steps)}
),
)
@classmethod
def machine_params(cls, mode="train", **kwargs):
num_gpus = torch.cuda.device_count()
has_gpu = num_gpus != 0
if mode == "train":
nprocesses = 20 if has_gpu else 4
gpu_ids = [0] if has_gpu else []
elif mode == "valid":
nprocesses = 1
gpu_ids = [1 % num_gpus] if has_gpu else []
elif mode == "test":
nprocesses = 1
gpu_ids = [0] if has_gpu else []
else:
raise NotImplementedError("mode must be 'train', 'valid', or 'test'.")
return MachineParams(nprocesses=nprocesses, devices=gpu_ids,)
@classmethod
def create_model(cls, **kwargs) -> nn.Module:
return ObjectNavActorCritic(
action_space=gym.spaces.Discrete(
len(ObjectNaviThorGridTask.class_action_names())
),
observation_space=SensorSuite(cls.SENSORS).observation_spaces,
rgb_uuid=cls.SENSORS[0].uuid,
depth_uuid=None,
goal_sensor_uuid="goal_object_type_ind",
hidden_size=512,
object_type_embedding_dim=8,
)
@classmethod
def make_sampler_fn(cls, **kwargs) -> TaskSampler:
return ObjectNavTaskSampler(**kwargs)
@staticmethod
def _partition_inds(n: int, num_parts: int):
return np.round(np.linspace(0, n, num_parts + 1, endpoint=True)).astype(
np.int32
)
def _get_sampler_args_for_scene_split(
self,
scenes: List[str],
process_ind: int,
total_processes: int,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
if total_processes > len(scenes): # oversample some scenes -> bias
if total_processes % len(scenes) != 0:
print(
"Warning: oversampling some of the scenes to feed all processes."
" You can avoid this by setting a number of workers divisible by the number of scenes"
)
scenes = scenes * int(ceil(total_processes / len(scenes)))
scenes = scenes[: total_processes * (len(scenes) // total_processes)]
else:
if len(scenes) % total_processes != 0:
print(
"Warning: oversampling some of the scenes to feed all processes."
" You can avoid this by setting a number of workers divisor of the number of scenes"
)
inds = self._partition_inds(len(scenes), total_processes)
return {
"scenes": scenes[inds[process_ind] : inds[process_ind + 1]],
"object_types": self.OBJECT_TYPES,
"env_args": self.ENV_ARGS,
"max_steps": self.MAX_STEPS,
"sensors": self.SENSORS,
"action_space": gym.spaces.Discrete(
len(ObjectNaviThorGridTask.class_action_names())
),
"seed": seeds[process_ind] if seeds is not None else None,
"deterministic_cudnn": deterministic_cudnn,
}
def train_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
res = self._get_sampler_args_for_scene_split(
self.TRAIN_SCENES,
process_ind,
total_processes,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
)
res["scene_period"] = "manual"
res["env_args"] = {}
res["env_args"].update(self.ENV_ARGS)
res["env_args"]["x_display"] = (
("0.%d" % devices[process_ind % len(devices)])
if devices is not None and len(devices) > 0
else None
)
return res
def valid_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
res = self._get_sampler_args_for_scene_split(
self.VALID_SCENES,
process_ind,
total_processes,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
)
res["scene_period"] = self.VALID_SAMPLES_IN_SCENE
res["max_tasks"] = self.VALID_SAMPLES_IN_SCENE * len(res["scenes"])
res["env_args"] = {}
res["env_args"].update(self.ENV_ARGS)
res["env_args"]["x_display"] = (
("0.%d" % devices[process_ind % len(devices)])
if devices is not None and len(devices) > 0
else None
)
return res
def test_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
res = self._get_sampler_args_for_scene_split(
self.TEST_SCENES,
process_ind,
total_processes,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
)
res["scene_period"] = self.TEST_SAMPLES_IN_SCENE
res["max_tasks"] = self.TEST_SAMPLES_IN_SCENE * len(res["scenes"])
res["env_args"] = {}
res["env_args"].update(self.ENV_ARGS)
res["env_args"]["x_display"] = (
("0.%d" % devices[process_ind % len(devices)])
if devices is not None and len(devices) > 0
else None
)
return res
|
allenact-main
|
projects/tutorials/object_nav_ithor_ppo_one_object.py
|
# literate: tutorials/distributed-objectnav-tutorial.md
# %%
"""# Tutorial: Distributed training across multiple nodes."""
# %%
"""
**Note** The provided commands to execute in this tutorial assume include a configuration script to
[clone the full library](../installation/installation-allenact.md#full-library). Setting up headless THOR might
require superuser privileges. We also assume [NCCL](https://developer.nvidia.com/nccl) is available for communication
across computation nodes and all nodes have a running `ssh` server.
The below introduced experimental tools and commands for distributed training assume a Linux OS (tested on Ubuntu
18.04).
In this tutorial, we:
1. Introduce the available API for training across multiple nodes, as well as experimental scripts for distributed
configuration, training start and termination, and remote command execution.
1. Introduce the headless mode for [AI2-THOR](https://ai2thor.allenai.org/) in `AllenAct`. Note that, in contrast with
previous tutorials using AI2-THOR, this time we don't require an xserver (in Linux) to be active.
1. Show a training example for RoboTHOR ObjectNav on a cluster, with each node having sufficient GPUs and GPU memory to
host 60 experience samplers collecting rollout data.
Thanks to the massive parallelization of experience collection and model training enabled by
[DD-PPO](https://arxiv.org/abs/1911.00357), we can greatly speed up training by scaling across multiple nodes:

## The task: ObjectNav
In ObjectNav, the goal for the agent is to navigate to an object (possibly unseen during training) of a known given
class and signal task completion when it determines it has reached the goal.
## Implementation
For this tutorial, we'll use the readily available `objectnav_baselines` project, which includes configurations for
a wide variety of object navigation experiments for both iTHOR and RoboTHOR. Since those configuration files are
defined for a single-node setup, we will mainly focus on the changes required in the `machine_params` and
`training_pipeline` methods.
Note that, in order to use the headless version of AI2-THOR, we currently need to install a specific THOR commit,
different from the default one in `robothor_plugin`. Note that this command is included in the configuration script
below, so **we don't need to run this**:
```bash
pip install --extra-index-url https://ai2thor-pypi.allenai.org ai2thor==0+91139c909576f3bf95a187c5b02c6fd455d06b48
```
The experiment config starts as follows:
"""
# %%
import math
from typing import Optional, Sequence
import torch
import torch.optim as optim
from torch.optim.lr_scheduler import LambdaLR
from allenact.algorithms.onpolicy_sync.losses import PPO
from allenact.algorithms.onpolicy_sync.losses.ppo import PPOConfig
from allenact.utils.experiment_utils import (
Builder,
LinearDecay,
MultiLinearDecay,
TrainingPipeline,
PipelineStage,
)
from projects.objectnav_baselines.experiments.robothor.objectnav_robothor_rgb_resnet18gru_ddppo import (
ObjectNavRoboThorRGBPPOExperimentConfig as BaseConfig,
)
class DistributedObjectNavRoboThorRGBPPOExperimentConfig(BaseConfig):
def tag(self) -> str:
return "DistributedObjectNavRoboThorRGBPPO"
# %%
"""We override ObjectNavRoboThorBaseConfig's THOR_COMMIT_ID to match the installed headless one:"""
# %%
THOR_COMMIT_ID = "91139c909576f3bf95a187c5b02c6fd455d06b48"
# %%
"""Also indicate that we're using headless THOR (for `task_sampler_args` methods):"""
# %%
THOR_IS_HEADLESS = True
# %%
"""**Temporary hack** Disable the `commit_id` argument passed to the THOR `Controller`'s `init` method:"""
# %%
def env_args(self):
res = super().env_args()
res.pop("commit_id", None)
return res
# %%
"""
And, of course, define the number of nodes. This will be used by `machine_params` and `training_pipeline` below.
We override the existing `ExperimentConfig`'s `init` method to include control on the number of nodes:
"""
# %%
def __init__(
self,
distributed_nodes: int = 1,
num_train_processes: Optional[int] = None,
train_gpu_ids: Optional[Sequence[int]] = None,
val_gpu_ids: Optional[Sequence[int]] = None,
test_gpu_ids: Optional[Sequence[int]] = None,
):
super().__init__(
num_train_processes=num_train_processes,
train_gpu_ids=train_gpu_ids,
val_gpu_ids=val_gpu_ids,
test_gpu_ids=test_gpu_ids,
)
self.distributed_nodes = distributed_nodes
# %%
"""
### Machine parameters
**Note:** We assume that all nodes are identical (same number and model of GPUs and drivers).
The `machine_params` method will be invoked by `runner.py` with different arguments, e.g. to determine the
configuration for validation or training.
When working in distributed settings, `AllenAct` needs to know the total number of trainers across all nodes as well
as the local number of trainers. This is accomplished through the introduction of a `machine_id` keyword argument,
which will be used to define the training parameters as follows:
"""
# %%
def machine_params(self, mode="train", **kwargs):
params = super().machine_params(mode, **kwargs)
if mode == "train":
params.devices = params.devices * self.distributed_nodes
params.nprocesses = params.nprocesses * self.distributed_nodes
params.sampler_devices = params.sampler_devices * self.distributed_nodes
if "machine_id" in kwargs:
machine_id = kwargs["machine_id"]
assert (
0 <= machine_id < self.distributed_nodes
), f"machine_id {machine_id} out of range [0, {self.distributed_nodes - 1}]"
local_worker_ids = list(
range(
len(self.train_gpu_ids) * machine_id,
len(self.train_gpu_ids) * (machine_id + 1),
)
)
params.set_local_worker_ids(local_worker_ids)
# Confirm we're setting up train params nicely:
print(
f"devices {params.devices}"
f"\nnprocesses {params.nprocesses}"
f"\nsampler_devices {params.sampler_devices}"
f"\nlocal_worker_ids {params.local_worker_ids}"
)
elif mode == "valid":
# Use all GPUs at their maximum capacity for training
# (you may run validation in a separate machine)
params.nprocesses = (0,)
return params
# %%
"""
In summary, we need to specify which indices in `devices`, `nprocesses` and `sampler_devices` correspond to the
local `machine_id` node (whenever a `machine_id` is given as a keyword argument), otherwise we specify the global
configuration.
### Training pipeline
In preliminary ObjectNav experiments, we observe that small batches are useful during the initial training steps in
terms of sample efficiency, whereas large batches are preferred during the rest of training.
In order to scale to the larger amount of collected data in multi-node settings, we will proceed with a two-stage
pipeline:
1. In the first stage, we'll enforce a number of updates per amount of collected data similar to the
configuration with a single node by enforcing more batches per rollout (for about 30 million steps).
1. In the second stage we'll switch to a configuration with larger learning rate and batch size to be
used up to the grand total of 300 million experience steps.
We first define a helper method to generate a learning rate curve with decay for each stage:
"""
# %%
@staticmethod
def lr_scheduler(small_batch_steps, transition_steps, ppo_steps, lr_scaling):
safe_small_batch_steps = int(small_batch_steps * 1.02)
large_batch_and_lr_steps = ppo_steps - safe_small_batch_steps - transition_steps
# Learning rate after small batch steps (assuming decay to 0)
break1 = 1.0 - safe_small_batch_steps / ppo_steps
# Initial learning rate for large batch (after transition from initial to large learning rate)
break2 = lr_scaling * (
1.0 - (safe_small_batch_steps + transition_steps) / ppo_steps
)
return MultiLinearDecay(
[
# Base learning rate phase for small batch (with linear decay towards 0)
LinearDecay(steps=safe_small_batch_steps, startp=1.0, endp=break1,),
# Allow the optimizer to adapt its statistics to the changes with a larger learning rate
LinearDecay(steps=transition_steps, startp=break1, endp=break2,),
# Scaled learning rate phase for large batch (with linear decay towards 0)
LinearDecay(steps=large_batch_and_lr_steps, startp=break2, endp=0,),
]
)
# %%
"""
The training pipeline looks like:
"""
# %%
def training_pipeline(self, **kwargs):
# These params are identical to the baseline configuration for 60 samplers (1 machine)
ppo_steps = int(300e6)
lr = 3e-4
num_mini_batch = 1
update_repeats = 4
num_steps = 128
save_interval = 5000000
log_interval = 10000 if torch.cuda.is_available() else 1
gamma = 0.99
use_gae = True
gae_lambda = 0.95
max_grad_norm = 0.5
# We add 30 million steps for small batch learning
small_batch_steps = int(30e6)
# And a short transition phase towards large learning rate
# (see comment in the `lr_scheduler` helper method
transition_steps = int(2 / 3 * self.distributed_nodes * 1e6)
# Find exact number of samplers per GPU
assert (
self.num_train_processes % len(self.train_gpu_ids) == 0
), "Expected uniform number of samplers per GPU"
samplers_per_gpu = self.num_train_processes // len(self.train_gpu_ids)
# Multiply num_mini_batch by the largest divisor of
# samplers_per_gpu to keep all batches of same size:
num_mini_batch_multiplier = [
i
for i in reversed(
range(1, min(samplers_per_gpu // 2, self.distributed_nodes) + 1)
)
if samplers_per_gpu % i == 0
][0]
# Multiply update_repeats so that the product of this factor and
# num_mini_batch_multiplier is >= self.distributed_nodes:
update_repeats_multiplier = int(
math.ceil(self.distributed_nodes / num_mini_batch_multiplier)
)
return TrainingPipeline(
save_interval=save_interval,
metric_accumulate_interval=log_interval,
optimizer_builder=Builder(optim.Adam, dict(lr=lr)),
num_mini_batch=num_mini_batch,
update_repeats=update_repeats,
max_grad_norm=max_grad_norm,
num_steps=num_steps,
named_losses={"ppo_loss": PPO(**PPOConfig, show_ratios=False)},
gamma=gamma,
use_gae=use_gae,
gae_lambda=gae_lambda,
advance_scene_rollout_period=self.ADVANCE_SCENE_ROLLOUT_PERIOD,
pipeline_stages=[
# We increase the number of batches for the first stage to reach an
# equivalent number of updates per collected rollout data as in the
# 1 node/60 samplers setting
PipelineStage(
loss_names=["ppo_loss"],
max_stage_steps=small_batch_steps,
num_mini_batch=num_mini_batch * num_mini_batch_multiplier,
update_repeats=update_repeats * update_repeats_multiplier,
),
# The we proceed with the base configuration (leading to larger
# batches due to the increased number of samplers)
PipelineStage(
loss_names=["ppo_loss"],
max_stage_steps=ppo_steps - small_batch_steps,
),
],
# We use the MultiLinearDecay curve defined by the helper function,
# setting the learning rate scaling as the square root of the number
# of nodes. Linear scaling might also works, but we leave that
# check to the reader.
lr_scheduler_builder=Builder(
LambdaLR,
{
"lr_lambda": self.lr_scheduler(
small_batch_steps=small_batch_steps,
transition_steps=transition_steps,
ppo_steps=ppo_steps,
lr_scaling=math.sqrt(self.distributed_nodes),
)
},
),
)
# %%
"""
## Multi-node configuration
**Note:** In the following, we'll assume you don't have an available setup for distributed execution, such as
[slurm](https://slurm.schedmd.com/documentation.html). If you do have access to a better alternative to setup and run
distributed processes, we encourage you to use that. The experimental distributed tools included here are intended for
a rather basic usage pattern that might not suit your needs.
If we haven't set up AllenAct with the headless version of Ai2-THOR in our nodes, we can define a configuration script
similar to:
```bash
#!/bin/bash
# Prepare a virtualenv for allenact
sudo apt-get install -y python3-venv
python3 -mvenv ~/allenact_venv
source ~/allenact_venv/bin/activate
pip install -U pip wheel
# Install AllenAct
cd ~
git clone https://github.com/allenai/allenact.git
cd allenact
# Install AllenaAct + RoboTHOR plugin dependencies
pip install -r requirements.txt
pip install -r allenact_plugins/robothor_plugin/extra_requirements.txt
# Download + setup datasets
bash datasets/download_navigation_datasets.sh robothor-objectnav
# Install headless AI2-THOR and required libvulkan1
sudo apt-get install -y libvulkan1
pip install --extra-index-url https://ai2thor-pypi.allenai.org ai2thor==0+91139c909576f3bf95a187c5b02c6fd455d06b48
# Download AI2-THOR binaries
python -c "from ai2thor.controller import Controller; c=Controller(); c.stop()"
echo DONE
```
and save it as `headless_robothor_config.sh`. Note that some of the configuration steps in the script assume you have
superuser privileges.
Then, we can just copy this file to the first node in our cluster and run it with:
```bash
source <PATH/TO/headless_robothor_config.sh>
```
If everything went well, we should be able to
```bash
cd ~/allenact && source ~/allenact_venv/bin/activate
```
Note that we might need to install `libvulkan1` in each node (even if the AllenAct setup is shared across nodes) if it
is not already available.
### Local filesystems
If our cluster does not use a shared filesystem, we'll need to propagate the setup to the rest of nodes. Assuming
we can just `ssh` with the current user to all nodes, we can propagate our config with
```bash
scripts/dconfig.py --runs_on <COMMA_SEPARATED_LIST_OF_IP_ADDRESSES> \
--config_script <PATH/TO/headless_robothor_config.sh>
```
and we can check the state of the installation with the `scripts/dcommand.py` tool:
```bash
scripts/dcommand.py --runs_on <COMMA_SEPARATED_LIST_OF_IP_ADDRESSES> \
--command 'tail -n 5 ~/log_allenact_distributed_config'
```
If everything went fine, all requirements are ready to start running our experiment.
## Run your experiment
**Note:** In this section, we again assume you don't have an available setup for distributed execution, such as
[slurm](https://slurm.schedmd.com/documentation.html). If you do have access to a better alternative to setup/run
distributed processes, we encourage you to use that. The experimental distributed tools included here are intended for
a rather basic usage pattern that might not suit your needs.
Our experimental extension to AllenAct's `main.py` script allows using practically identical commands to the ones
used in a single-node setup to start our experiments. From the root `allenact` directory, we can simply invoke
```bash
scripts/dmain.py projects/tutorials/distributed_objectnav_tutorial.py \
--config_kwargs '{"distributed_nodes":3}' \
--runs_on <COMMA_SEPARATED_LIST_OF_IP_ADDRESSES> \
--env_activate_path ~/allenact_venv/bin/activate \
--allenact_path ~/allenact \
--distributed_ip_and_port <FIRST_IP_ADDRESS_IN_RUNS_ON_LIST>:<FREE_PORT_NUMBER_FOR_THIS_IP_ADDRESS>
```
This script will do several things for you, including synchronization of the changes in the `allenact` directory
to all machines, enabling virtual environments in each node, sharing the same random seed for all `main.py` instances,
assigning `--machine_id` parameters required for multi-node training, and redirecting the process output to a log file
under the output results folder.
Note that by changing the value associated with the `distributed_nodes` key in the `config_kwargs` map and the `runs_on`
list of IPs, we can easily scale our training to e.g. 1, 3, or 8 nodes as shown in the chart above. Note that for this
call to work unmodified, you should have sufficient GPUs/GPU memory to host 60 samplers per node.
## Track and stop your experiment
You might have noticed that, when your experiment started with the above command, a file was created under
`~/.allenact`. This file includes IP addresses and screen session IDs for all nodes. It can be used
by the already introduced `scripts/dcommand.py` script, if we omit the `--runs_on` argument, to call a command on each
node via ssh; but most importantly it is used by the `scripts/dkill.py` script to terminate all screen sessions hosting
our training processes.
### Experiment tracking
A simple way to check all machines are training, assuming you have `nvidia-smi` installed in all nodes, is to just call
```bash
scripts/dcommand.py
```
from the root `allenact` directory. If everything is working well, the GPU usage stats from `nvidia-smi` should reflect
ongoing activity. You can also add different commands to be executed by each node. It is of course also possible to run
tensorboard on any of the nodes, if that's your preference.
### Experiment termination
Just call
```bash
scripts/dkill.py
```
After killing all involved screen sessions, you will be asked about whether you also want to delete the "killfile"
stored under the `~/.allenact` directory (which might be your preferred option once all processes are terminated).
We hope this tutorial will help you start quickly testing new ideas! Even if we've only explored moderates settings of
up to 480 experience samplers, you might want to consider some additional changes (like the
[choice for the optimizer](https://arxiv.org/abs/2103.07013)) if you plan to run at larger scale.
"""
|
allenact-main
|
projects/tutorials/distributed_objectnav_tutorial.py
|
# literate: tutorials/minigrid-tutorial.md
# %%
"""# Tutorial: Navigation in MiniGrid."""
# %%
"""
In this tutorial, we will train an agent to complete the `MiniGrid-Empty-Random-5x5-v0` task within the
[MiniGrid](https://github.com/maximecb/gym-minigrid) environment. We will demonstrate how to:
* Write an experiment configuration file with a simple training pipeline from scratch.
* Use one of the supported environments with minimal user effort.
* Train, validate and test your experiment from the command line.
This tutorial assumes the [installation instructions](../installation/installation-allenact.md) have already been
followed and that, to some extent, this framework's [abstractions](../getting_started/abstractions.md) are known.
The `extra_requirements` for `minigrid_plugin` and `babyai_plugin` can be installed with.
```bash
pip install -r allenact_plugins/minigrid_plugin/extra_requirements.txt; pip install -r allenact_plugins/babyai_plugin/extra_requirements.txt
```
## The task
A `MiniGrid-Empty-Random-5x5-v0` task consists of a grid of dimensions 5x5 where an agent spawned at a random
location and orientation has to navigate to the visitable bottom right corner cell of the grid by sequences of three
possible actions (rotate left/right and move forward). A visualization of the environment with expert steps in a random
`MiniGrid-Empty-Random-5x5-v0` task looks like

The observation for the agent is a subset of the entire grid, simulating a simplified limited field of view, as
depicted by the highlighted rectangle (observed subset of the grid) around the agent (red arrow). Gray cells correspond
to walls.
## Experiment configuration file
Our complete experiment consists of:
* Training a basic actor-critic agent with memory to solve randomly sampled navigation tasks.
* Validation on a fixed set of tasks (running in parallel with training).
* A second stage where we test saved checkpoints with a larger fixed set of tasks.
The entire configuration for the experiment, including training, validation, and testing, is encapsulated in a single
class implementing the `ExperimentConfig` abstraction. For this tutorial, we will follow the config under
`projects/tutorials/minigrid_tutorial.py`.
The `ExperimentConfig` abstraction is used by the
[OnPolicyTrainer](../api/allenact/algorithms/onpolicy_sync/engine.md#onpolicytrainer) class (for training) and the
[OnPolicyInference](../api/allenact/algorithms/onpolicy_sync/engine.md#onpolicyinference) class (for validation and testing)
invoked through the entry script `main.py` that calls an orchestrating
[OnPolicyRunner](../api/allenact/algorithms/onpolicy_sync/runner.md#onpolicyrunner) class. It includes:
* A `tag` method to identify the experiment.
* A `create_model` method to instantiate actor-critic models.
* A `make_sampler_fn` method to instantiate task samplers.
* Three `{train,valid,test}_task_sampler_args` methods describing initialization parameters for task samplers used in
training, validation, and testing; including assignment of workers to devices for simulation.
* A `machine_params` method with configuration parameters that will be used for training, validation, and testing.
* A `training_pipeline` method describing a possibly multi-staged training pipeline with different types of losses,
an optimizer, and other parameters like learning rates, batch sizes, etc.
### Preliminaries
We first import everything we'll need to define our experiment.
"""
# %%
from typing import Dict, Optional, List, Any, cast
import gym
from gym_minigrid.envs import EmptyRandomEnv5x5
import torch.nn as nn
import torch.optim as optim
from torch.optim.lr_scheduler import LambdaLR
from allenact.algorithms.onpolicy_sync.losses.ppo import PPO, PPOConfig
from allenact.base_abstractions.experiment_config import ExperimentConfig, TaskSampler
from allenact.base_abstractions.sensor import SensorSuite
from allenact.utils.experiment_utils import (
TrainingPipeline,
Builder,
PipelineStage,
LinearDecay,
)
from allenact_plugins.minigrid_plugin.minigrid_models import MiniGridSimpleConvRNN
from allenact_plugins.minigrid_plugin.minigrid_sensors import EgocentricMiniGridSensor
from allenact_plugins.minigrid_plugin.minigrid_tasks import (
MiniGridTaskSampler,
MiniGridTask,
)
# %%
"""
We now create the `MiniGridTutorialExperimentConfig` class which we will use to define our experiment.
For pedagogical reasons, we will add methods to this class one at a time below with a description of what
these classes do.
"""
# %%
class MiniGridTutorialExperimentConfig(ExperimentConfig):
# %%
"""An experiment is identified by a `tag`."""
# %%
@classmethod
def tag(cls) -> str:
return "MiniGridTutorial"
# %%
"""
### Sensors and Model
A readily available Sensor type for MiniGrid,
[EgocentricMiniGridSensor](../api/allenact_plugins/minigrid_plugin/minigrid_sensors.md#egocentricminigridsensor),
allows us to extract observations in a format consumable by an `ActorCriticModel` agent:
"""
# %%
SENSORS = [
EgocentricMiniGridSensor(agent_view_size=5, view_channels=3),
]
# %%
"""
The three `view_channels` include objects, colors and states corresponding to a partial observation of the environment
as an image tensor, equivalent to that from `ImgObsWrapper` in
[MiniGrid](https://github.com/maximecb/gym-minigrid#wrappers). The
relatively large `agent_view_size` means the view will only be clipped by the environment walls in the forward and
lateral directions with respect to the agent's orientation.
We define our `ActorCriticModel` agent using a lightweight implementation with recurrent memory for MiniGrid
environments, [MiniGridSimpleConvRNN](../api/allenact_plugins/minigrid_plugin/minigrid_models.md#minigridsimpleconvrnn):
"""
# %%
@classmethod
def create_model(cls, **kwargs) -> nn.Module:
return MiniGridSimpleConvRNN(
action_space=gym.spaces.Discrete(len(MiniGridTask.class_action_names())),
observation_space=SensorSuite(cls.SENSORS).observation_spaces,
num_objects=cls.SENSORS[0].num_objects,
num_colors=cls.SENSORS[0].num_colors,
num_states=cls.SENSORS[0].num_states,
)
# %%
"""
### Task samplers
We use an available TaskSampler implementation for MiniGrid environments that allows to sample both random and
deterministic `MiniGridTasks`,
[MiniGridTaskSampler](../api/allenact_plugins/minigrid_plugin/minigrid_tasks.md#minigridtasksampler):
"""
# %%
@classmethod
def make_sampler_fn(cls, **kwargs) -> TaskSampler:
return MiniGridTaskSampler(**kwargs)
# %%
"""
This task sampler will during training (or validation/testing), randomly initialize new tasks for the agent to complete.
While it is not quite as important for this task type (as we test our agent in the same setting it is trained on) there
are a lot of good reasons we would like to sample tasks differently during training than during validation or testing.
One good reason, that is applicable in this tutorial, is that, during training, we would like to be able to sample tasks
forever while, during testing, we would like to sample a fixed number of tasks (as otherwise we would never finish
testing!). In `allenact` this is made possible by defining different arguments for the task sampler:
"""
# %%
def train_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
return self._get_sampler_args(process_ind=process_ind, mode="train")
def valid_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
return self._get_sampler_args(process_ind=process_ind, mode="valid")
def test_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
return self._get_sampler_args(process_ind=process_ind, mode="test")
# %%
"""
where, for convenience, we have defined a `_get_sampler_args` method:
"""
# %%
def _get_sampler_args(self, process_ind: int, mode: str) -> Dict[str, Any]:
"""Generate initialization arguments for train, valid, and test
TaskSamplers.
# Parameters
process_ind : index of the current task sampler
mode: one of `train`, `valid`, or `test`
"""
if mode == "train":
max_tasks = None # infinite training tasks
task_seeds_list = None # no predefined random seeds for training
deterministic_sampling = False # randomly sample tasks in training
else:
max_tasks = 20 + 20 * (mode == "test") # 20 tasks for valid, 40 for test
# one seed for each task to sample:
# - ensures different seeds for each sampler, and
# - ensures a deterministic set of sampled tasks.
task_seeds_list = list(
range(process_ind * max_tasks, (process_ind + 1) * max_tasks)
)
deterministic_sampling = (
True # deterministically sample task in validation/testing
)
return dict(
max_tasks=max_tasks, # see above
env_class=self.make_env, # builder for third-party environment (defined below)
sensors=self.SENSORS, # sensors used to return observations to the agent
env_info=dict(), # parameters for environment builder (none for now)
task_seeds_list=task_seeds_list, # see above
deterministic_sampling=deterministic_sampling, # see above
)
@staticmethod
def make_env(*args, **kwargs):
return EmptyRandomEnv5x5()
# %%
"""
Note that the `env_class` argument to the Task Sampler is the one determining which task type we are going to train the
model for (in this case, `MiniGrid-Empty-Random-5x5-v0` from
[gym-minigrid](https://github.com/maximecb/gym-minigrid#empty-environment))
. The sparse reward is
[given by the environment](https://github.com/maximecb/gym-minigrid/blob/6e22a44dc67414b647063692258a4f95ce789161/gym_minigrid/minigrid.py#L819)
, and the maximum task length is 100. For training, we opt for a default random sampling, whereas for validation and
test we define fixed sets of randomly sampled tasks without needing to explicitly define a dataset.
In this toy example, the maximum number of different tasks is 32. For validation we sample 320 tasks using 16 samplers,
or 640 for testing, so we can be fairly sure that all possible tasks are visited at least once during evaluation.
### Machine parameters
Given the simplicity of the task and model, we can quickly train the model on the CPU:
"""
# %%
@classmethod
def machine_params(cls, mode="train", **kwargs) -> Dict[str, Any]:
return {
"nprocesses": 128 if mode == "train" else 16,
"devices": [],
}
# %%
"""
We allocate a larger number of samplers for training (128) than for validation or testing (16), and we default to CPU
usage by returning an empty list of `devices`.
### Training pipeline
The last definition required before starting to train is a training pipeline. In this case, we just use a single PPO
stage with linearly decaying learning rate:
"""
# %%
@classmethod
def training_pipeline(cls, **kwargs) -> TrainingPipeline:
ppo_steps = int(150000)
return TrainingPipeline(
named_losses=dict(ppo_loss=PPO(**PPOConfig)), # type:ignore
pipeline_stages=[
PipelineStage(loss_names=["ppo_loss"], max_stage_steps=ppo_steps)
],
optimizer_builder=Builder(cast(optim.Optimizer, optim.Adam), dict(lr=1e-4)),
num_mini_batch=4,
update_repeats=3,
max_grad_norm=0.5,
num_steps=16,
gamma=0.99,
use_gae=True,
gae_lambda=0.95,
advance_scene_rollout_period=None,
save_interval=10000,
metric_accumulate_interval=1,
lr_scheduler_builder=Builder(
LambdaLR, {"lr_lambda": LinearDecay(steps=ppo_steps)} # type:ignore
),
)
# %%
"""
You can see that we use a `Builder` class to postpone the construction of some of the elements, like the optimizer,
for which the model weights need to be known.
## Training and validation
We have a complete implementation of this experiment's configuration class in `projects/tutorials/minigrid_tutorial.py`.
To start training from scratch, we just need to invoke
```bash
PYTHONPATH=. python allenact/main.py minigrid_tutorial -b projects/tutorials -m 8 -o /PATH/TO/minigrid_output -s 12345
```
from the `allenact` root directory.
* With `-b projects/tutorials` we tell `allenact` that `minigrid_tutorial` experiment config file
will be found in the `projects/tutorials` directory.
* With `-m 8` we limit the number of subprocesses to 8 (each subprocess will run 16 of the 128 training task samplers).
* With `-o minigrid_output` we set the output folder into which results and logs will be saved.
* With `-s 12345` we set the random seed.
If we have Tensorboard installed, we can track progress with
```bash
tensorboard --logdir /PATH/TO/minigrid_output
```
which will default to the URL [http://localhost:6006/](http://localhost:6006/).
After 150,000 steps, the script will terminate and several checkpoints will be saved in the output folder.
The training curves should look similar to:

If everything went well, the `valid` success rate should converge to 1 and the mean episode length to a value below 4.
(For perfectly uniform sampling and complete observation, the expectation for the optimal policy is 3.75 steps.) In the
not-so-unlikely event of the run failing to converge to a near-optimal policy, we can just try to re-run (for example
with a different random seed). The validation curves should look similar to:

## Testing
The training start date for the experiment, in `YYYY-MM-DD_HH-MM-SS` format, is used as the name of one of the
subfolders in the path to the checkpoints, saved under the output folder.
In order to evaluate (i.e. test) a particular checkpoint, we need to pass the `--eval` flag and specify the checkpoint with the
`--checkpoint CHECKPOINT_PATH` option:
```bash
PYTHONPATH=. python allenact/main.py minigrid_tutorial \
-b projects/tutorials \
-m 1 \
-o /PATH/TO/minigrid_output \
-s 12345 \
--eval \
--checkpoint /PATH/TO/minigrid_output/checkpoints/MiniGridTutorial/YOUR_START_DATE/exp_MiniGridTutorial__stage_00__steps_000000151552.pt
```
Again, if everything went well, the `test` success rate should converge to 1 and the mean episode length to a value
below 4. Detailed results are saved under a `metrics` subfolder in the output folder.
The test curves should look similar to:

"""
|
allenact-main
|
projects/tutorials/minigrid_tutorial.py
|
from typing import Dict, Optional, List, Any, cast, Callable, Union, Tuple
import gym
import numpy as np
import torch
import torch.nn as nn
import torch.optim as optim
from gym_minigrid.envs import EmptyRandomEnv5x5
from gym_minigrid.minigrid import MiniGridEnv
from torch.optim.lr_scheduler import LambdaLR
from allenact.algorithms.onpolicy_sync.losses.imitation import Imitation
from allenact.algorithms.onpolicy_sync.losses.ppo import PPO, PPOConfig
from allenact.algorithms.onpolicy_sync.policy import ActorCriticModel, DistributionType
from allenact.base_abstractions.distributions import (
CategoricalDistr,
ConditionalDistr,
SequentialDistr,
)
from allenact.base_abstractions.experiment_config import ExperimentConfig, TaskSampler
from allenact.base_abstractions.misc import ActorCriticOutput, Memory, RLStepResult
from allenact.base_abstractions.sensor import SensorSuite, ExpertActionSensor
from allenact.embodiedai.models.basic_models import RNNStateEncoder
from allenact.utils.experiment_utils import (
TrainingPipeline,
Builder,
PipelineStage,
LinearDecay,
)
from allenact.utils.misc_utils import prepare_locals_for_super
from allenact_plugins.minigrid_plugin.minigrid_models import MiniGridSimpleConvBase
from allenact_plugins.minigrid_plugin.minigrid_sensors import EgocentricMiniGridSensor
from allenact_plugins.minigrid_plugin.minigrid_tasks import (
MiniGridTaskSampler,
MiniGridTask,
)
class ConditionedLinearActorCriticHead(nn.Module):
def __init__(
self, input_size: int, master_actions: int = 2, subpolicy_actions: int = 2
):
super().__init__()
self.input_size = input_size
self.master_and_critic = nn.Linear(input_size, master_actions + 1)
self.embed_higher = nn.Embedding(num_embeddings=2, embedding_dim=input_size)
self.actor = nn.Linear(2 * input_size, subpolicy_actions)
nn.init.orthogonal_(self.master_and_critic.weight)
nn.init.constant_(self.master_and_critic.bias, 0)
nn.init.orthogonal_(self.actor.weight)
nn.init.constant_(self.actor.bias, 0)
def lower_policy(self, *args, **kwargs):
assert "higher" in kwargs
assert "state_embedding" in kwargs
emb = self.embed_higher(kwargs["higher"])
logits = self.actor(torch.cat([emb, kwargs["state_embedding"]], dim=-1))
return CategoricalDistr(logits=logits)
def forward(self, x):
out = self.master_and_critic(x)
master_logits = out[..., :-1]
values = out[..., -1:]
# noinspection PyArgumentList
cond1 = ConditionalDistr(
distr_conditioned_on_input_fn_or_instance=CategoricalDistr(
logits=master_logits
),
action_group_name="higher",
)
cond2 = ConditionalDistr(
distr_conditioned_on_input_fn_or_instance=lambda *args, **kwargs: ConditionedLinearActorCriticHead.lower_policy(
self, *args, **kwargs
),
action_group_name="lower",
state_embedding=x,
)
return (
SequentialDistr(cond1, cond2),
values.view(*values.shape[:2], -1), # [steps, samplers, flattened]
)
class ConditionedLinearActorCritic(ActorCriticModel[SequentialDistr]):
def __init__(
self,
input_uuid: str,
action_space: gym.spaces.Dict,
observation_space: gym.spaces.Dict,
):
super().__init__(action_space=action_space, observation_space=observation_space)
assert (
input_uuid in observation_space.spaces
), "ConditionedLinearActorCritic expects only a single observational input."
self.input_uuid = input_uuid
box_space: gym.spaces.Box = observation_space[self.input_uuid]
assert isinstance(box_space, gym.spaces.Box), (
"ConditionedLinearActorCritic requires that"
"observation space corresponding to the input uuid is a Box space."
)
assert len(box_space.shape) == 1
self.in_dim = box_space.shape[0]
self.head = ConditionedLinearActorCriticHead(
input_size=self.in_dim,
master_actions=action_space["higher"].n,
subpolicy_actions=action_space["lower"].n,
)
# noinspection PyMethodMayBeStatic
def _recurrent_memory_specification(self):
return None
def forward(self, observations, memory, prev_actions, masks):
dists, values = self.head(observations[self.input_uuid])
# noinspection PyArgumentList
return (
ActorCriticOutput(distributions=dists, values=values, extras={},),
None,
)
class ConditionedRNNActorCritic(ActorCriticModel[SequentialDistr]):
def __init__(
self,
input_uuid: str,
action_space: gym.spaces.Dict,
observation_space: gym.spaces.Dict,
hidden_size: int = 128,
num_layers: int = 1,
rnn_type: str = "GRU",
head_type: Callable[
..., ActorCriticModel[SequentialDistr]
] = ConditionedLinearActorCritic,
):
super().__init__(action_space=action_space, observation_space=observation_space)
self.hidden_size = hidden_size
self.rnn_type = rnn_type
assert (
input_uuid in observation_space.spaces
), "LinearActorCritic expects only a single observational input."
self.input_uuid = input_uuid
box_space: gym.spaces.Box = observation_space[self.input_uuid]
assert isinstance(box_space, gym.spaces.Box), (
"RNNActorCritic requires that"
"observation space corresponding to the input uuid is a Box space."
)
assert len(box_space.shape) == 1
self.in_dim = box_space.shape[0]
self.state_encoder = RNNStateEncoder(
input_size=self.in_dim,
hidden_size=hidden_size,
num_layers=num_layers,
rnn_type=rnn_type,
trainable_masked_hidden_state=True,
)
self.head_uuid = "{}_{}".format("rnn", input_uuid)
self.ac_nonrecurrent_head: ActorCriticModel[SequentialDistr] = head_type(
input_uuid=self.head_uuid,
action_space=action_space,
observation_space=gym.spaces.Dict(
{
self.head_uuid: gym.spaces.Box(
low=np.float32(0.0), high=np.float32(1.0), shape=(hidden_size,)
)
}
),
)
self.memory_key = "rnn"
@property
def recurrent_hidden_state_size(self) -> int:
return self.hidden_size
@property
def num_recurrent_layers(self) -> int:
return self.state_encoder.num_recurrent_layers
def _recurrent_memory_specification(self):
return {
self.memory_key: (
(
("layer", self.num_recurrent_layers),
("sampler", None),
("hidden", self.recurrent_hidden_state_size),
),
torch.float32,
)
}
def forward( # type:ignore
self,
observations: Dict[str, Union[torch.FloatTensor, Dict[str, Any]]],
memory: Memory,
prev_actions: torch.Tensor,
masks: torch.FloatTensor,
) -> Tuple[ActorCriticOutput[DistributionType], Optional[Memory]]:
rnn_out, mem_return = self.state_encoder(
x=observations[self.input_uuid],
hidden_states=memory.tensor(self.memory_key),
masks=masks,
)
# noinspection PyCallingNonCallable
out, _ = self.ac_nonrecurrent_head(
observations={self.head_uuid: rnn_out},
memory=None,
prev_actions=prev_actions,
masks=masks,
)
# noinspection PyArgumentList
return (
out,
memory.set_tensor(self.memory_key, mem_return),
)
class ConditionedMiniGridSimpleConvRNN(MiniGridSimpleConvBase):
def __init__(
self,
action_space: gym.spaces.Dict,
observation_space: gym.spaces.Dict,
num_objects: int,
num_colors: int,
num_states: int,
object_embedding_dim: int = 8,
hidden_size=512,
num_layers=1,
rnn_type="GRU",
head_type: Callable[
..., ActorCriticModel[SequentialDistr]
] = ConditionedLinearActorCritic,
**kwargs,
):
super().__init__(**prepare_locals_for_super(locals()))
self._hidden_size = hidden_size
agent_view_x, agent_view_y, view_channels = observation_space[
"minigrid_ego_image"
].shape
self.actor_critic = ConditionedRNNActorCritic(
input_uuid=self.ac_key,
action_space=action_space,
observation_space=gym.spaces.Dict(
{
self.ac_key: gym.spaces.Box(
low=np.float32(-1.0),
high=np.float32(1.0),
shape=(
self.object_embedding_dim
* agent_view_x
* agent_view_y
* view_channels,
),
)
}
),
hidden_size=hidden_size,
num_layers=num_layers,
rnn_type=rnn_type,
head_type=head_type,
)
self.memory_key = "rnn"
self.train()
@property
def num_recurrent_layers(self):
return self.actor_critic.num_recurrent_layers
@property
def recurrent_hidden_state_size(self):
return self._hidden_size
def _recurrent_memory_specification(self):
return {
self.memory_key: (
(
("layer", self.num_recurrent_layers),
("sampler", None),
("hidden", self.recurrent_hidden_state_size),
),
torch.float32,
)
}
class ConditionedMiniGridTask(MiniGridTask):
_ACTION_NAMES = ("left", "right", "forward", "pickup")
_ACTION_IND_TO_MINIGRID_IND = tuple(
MiniGridEnv.Actions.__members__[name].value for name in _ACTION_NAMES
)
@property
def action_space(self) -> gym.spaces.Dict:
return gym.spaces.Dict(
higher=gym.spaces.Discrete(2), lower=gym.spaces.Discrete(2)
)
def _step(self, action: Dict[str, int]) -> RLStepResult:
assert len(action) == 2, "got action={}".format(action)
minigrid_obs, reward, self._minigrid_done, info = self.env.step(
action=(
self._ACTION_IND_TO_MINIGRID_IND[action["lower"] + 2 * action["higher"]]
)
)
# self.env.render()
return RLStepResult(
observation=self.get_observations(minigrid_output_obs=minigrid_obs),
reward=reward,
done=self.is_done(),
info=info,
)
def query_expert(self, **kwargs) -> Tuple[int, bool]:
if kwargs["expert_sensor_group_name"] == "higher":
if self._minigrid_done:
raise ValueError("Episode is completed, but expert is still queried.")
# return 0, False
self.cached_expert = super().query_expert(**kwargs)
if self.cached_expert[1]:
return self.cached_expert[0] // 2, True
else:
return 0, False
else:
assert hasattr(self, "cached_expert")
if self.cached_expert[1]:
res = (self.cached_expert[0] % 2, True)
else:
res = (0, False)
del self.cached_expert
return res
class MiniGridTutorialExperimentConfig(ExperimentConfig):
@classmethod
def tag(cls) -> str:
return "MiniGridTutorial"
SENSORS = [
EgocentricMiniGridSensor(agent_view_size=5, view_channels=3),
ExpertActionSensor(
action_space=gym.spaces.Dict(
higher=gym.spaces.Discrete(2), lower=gym.spaces.Discrete(2)
)
),
]
@classmethod
def create_model(cls, **kwargs) -> nn.Module:
return ConditionedMiniGridSimpleConvRNN(
action_space=gym.spaces.Dict(
higher=gym.spaces.Discrete(2), lower=gym.spaces.Discrete(2)
),
observation_space=SensorSuite(cls.SENSORS).observation_spaces,
num_objects=cls.SENSORS[0].num_objects,
num_colors=cls.SENSORS[0].num_colors,
num_states=cls.SENSORS[0].num_states,
)
@classmethod
def make_sampler_fn(cls, **kwargs) -> TaskSampler:
return MiniGridTaskSampler(**kwargs)
def train_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
return self._get_sampler_args(process_ind=process_ind, mode="train")
def valid_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
return self._get_sampler_args(process_ind=process_ind, mode="valid")
def test_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
return self._get_sampler_args(process_ind=process_ind, mode="test")
def _get_sampler_args(self, process_ind: int, mode: str) -> Dict[str, Any]:
"""Generate initialization arguments for train, valid, and test
TaskSamplers.
# Parameters
process_ind : index of the current task sampler
mode: one of `train`, `valid`, or `test`
"""
if mode == "train":
max_tasks = None # infinite training tasks
task_seeds_list = None # no predefined random seeds for training
deterministic_sampling = False # randomly sample tasks in training
else:
max_tasks = 20 + 20 * (
mode == "test"
) # 20 tasks for valid, 40 for test (per sampler)
# one seed for each task to sample:
# - ensures different seeds for each sampler, and
# - ensures a deterministic set of sampled tasks.
task_seeds_list = list(
range(process_ind * max_tasks, (process_ind + 1) * max_tasks)
)
deterministic_sampling = (
True # deterministically sample task in validation/testing
)
return dict(
max_tasks=max_tasks, # see above
env_class=self.make_env, # builder for third-party environment (defined below)
sensors=self.SENSORS, # sensors used to return observations to the agent
env_info=dict(), # parameters for environment builder (none for now)
task_seeds_list=task_seeds_list, # see above
deterministic_sampling=deterministic_sampling, # see above
task_class=ConditionedMiniGridTask,
)
@staticmethod
def make_env(*args, **kwargs):
return EmptyRandomEnv5x5()
@classmethod
def machine_params(cls, mode="train", **kwargs) -> Dict[str, Any]:
return {
"nprocesses": 128 if mode == "train" else 16,
"devices": [],
}
@classmethod
def training_pipeline(cls, **kwargs) -> TrainingPipeline:
ppo_steps = int(150000)
return TrainingPipeline(
named_losses=dict(
imitation_loss=Imitation(
cls.SENSORS[1]
), # 0 is Minigrid, 1 is ExpertActionSensor
ppo_loss=PPO(**PPOConfig, entropy_method_name="conditional_entropy"),
), # type:ignore
pipeline_stages=[
PipelineStage(
teacher_forcing=LinearDecay(
startp=1.0, endp=0.0, steps=ppo_steps // 2,
),
loss_names=["imitation_loss", "ppo_loss"],
max_stage_steps=ppo_steps,
)
],
optimizer_builder=Builder(cast(optim.Optimizer, optim.Adam), dict(lr=1e-4)),
num_mini_batch=4,
update_repeats=3,
max_grad_norm=0.5,
num_steps=16,
gamma=0.99,
use_gae=True,
gae_lambda=0.95,
advance_scene_rollout_period=None,
save_interval=10000,
metric_accumulate_interval=1,
lr_scheduler_builder=Builder(
LambdaLR, {"lr_lambda": LinearDecay(steps=ppo_steps)} # type:ignore
),
)
|
allenact-main
|
projects/tutorials/minigrid_tutorial_conds.py
|
allenact-main
|
projects/manipulathor_baselines/__init__.py
|
|
allenact-main
|
projects/manipulathor_baselines/armpointnav_baselines/__init__.py
|
|
import platform
from abc import ABC
from math import ceil
from typing import Dict, Any, List, Optional, Sequence
import gym
import numpy as np
import torch
from allenact.base_abstractions.experiment_config import MachineParams
from allenact.base_abstractions.preprocessor import SensorPreprocessorGraph
from allenact.base_abstractions.sensor import SensorSuite, ExpertActionSensor
from allenact.base_abstractions.task import TaskSampler
from allenact.utils.experiment_utils import evenly_distribute_count_into_bins
from allenact_plugins.manipulathor_plugin.manipulathor_constants import ENV_ARGS
from allenact_plugins.manipulathor_plugin.manipulathor_task_samplers import (
SimpleArmPointNavGeneralSampler,
)
from allenact_plugins.manipulathor_plugin.manipulathor_viz import (
ImageVisualizer,
TestMetricLogger,
)
from projects.manipulathor_baselines.armpointnav_baselines.experiments.armpointnav_base import (
ArmPointNavBaseConfig,
)
class ArmPointNavThorBaseConfig(ArmPointNavBaseConfig, ABC):
"""The base config for all iTHOR PointNav experiments."""
TASK_SAMPLER = SimpleArmPointNavGeneralSampler
VISUALIZE = False
if platform.system() == "Darwin":
VISUALIZE = True
NUM_PROCESSES: Optional[int] = None
TRAIN_GPU_IDS = list(range(torch.cuda.device_count()))
SAMPLER_GPU_IDS = TRAIN_GPU_IDS
VALID_GPU_IDS = [torch.cuda.device_count() - 1]
TEST_GPU_IDS = [torch.cuda.device_count() - 1]
TRAIN_DATASET_DIR: Optional[str] = None
VAL_DATASET_DIR: Optional[str] = None
CAP_TRAINING = None
TRAIN_SCENES: Optional[List[str]] = None
VAL_SCENES: Optional[List[str]] = None
TEST_SCENES: Optional[List[str]] = None
OBJECT_TYPES: Optional[Sequence[str]] = None
VALID_SAMPLES_IN_SCENE = 1
TEST_SAMPLES_IN_SCENE = 1
NUMBER_OF_TEST_PROCESS = 10
def __init__(self):
super().__init__()
assert (
self.CAMERA_WIDTH == 224
and self.CAMERA_HEIGHT == 224
and self.VISIBILITY_DISTANCE == 1
and self.STEP_SIZE == 0.25
)
self.ENV_ARGS = ENV_ARGS
def machine_params(self, mode="train", **kwargs):
sampler_devices: Sequence[int] = []
if mode == "train":
workers_per_device = 1
gpu_ids = (
[]
if not torch.cuda.is_available()
else self.TRAIN_GPU_IDS * workers_per_device
)
nprocesses = (
1
if not torch.cuda.is_available()
else evenly_distribute_count_into_bins(self.NUM_PROCESSES, len(gpu_ids))
)
sampler_devices = self.SAMPLER_GPU_IDS
elif mode == "valid":
nprocesses = 1
gpu_ids = [] if not torch.cuda.is_available() else self.VALID_GPU_IDS
elif mode == "test":
nprocesses = self.NUMBER_OF_TEST_PROCESS if torch.cuda.is_available() else 1
gpu_ids = [] if not torch.cuda.is_available() else self.TEST_GPU_IDS
else:
raise NotImplementedError("mode must be 'train', 'valid', or 'test'.")
sensors = [*self.SENSORS]
if mode != "train":
sensors = [s for s in sensors if not isinstance(s, ExpertActionSensor)]
sensor_preprocessor_graph = (
SensorPreprocessorGraph(
source_observation_spaces=SensorSuite(sensors).observation_spaces,
preprocessors=self.preprocessors(),
)
if mode == "train"
or (
(isinstance(nprocesses, int) and nprocesses > 0)
or (isinstance(nprocesses, Sequence) and sum(nprocesses) > 0)
)
else None
)
return MachineParams(
nprocesses=nprocesses,
devices=gpu_ids,
sampler_devices=sampler_devices
if mode == "train"
else gpu_ids, # ignored with > 1 gpu_ids
sensor_preprocessor_graph=sensor_preprocessor_graph,
)
@classmethod
def make_sampler_fn(cls, **kwargs) -> TaskSampler:
from datetime import datetime
now = datetime.now()
exp_name_w_time = cls.__name__ + "_" + now.strftime("%m_%d_%Y_%H_%M_%S_%f")
if cls.VISUALIZE:
visualizers = [
ImageVisualizer(exp_name=exp_name_w_time),
TestMetricLogger(exp_name=exp_name_w_time),
]
kwargs["visualizers"] = visualizers
kwargs["objects"] = cls.OBJECT_TYPES
kwargs["exp_name"] = exp_name_w_time
return cls.TASK_SAMPLER(**kwargs)
@staticmethod
def _partition_inds(n: int, num_parts: int):
return np.round(np.linspace(0, n, num_parts + 1, endpoint=True)).astype(
np.int32
)
def _get_sampler_args_for_scene_split(
self,
scenes: List[str],
process_ind: int,
total_processes: int,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
if total_processes > len(scenes): # oversample some scenes -> bias
if total_processes % len(scenes) != 0:
print(
"Warning: oversampling some of the scenes to feed all processes."
" You can avoid this by setting a number of workers divisible by the number of scenes"
)
scenes = scenes * int(ceil(total_processes / len(scenes)))
scenes = scenes[: total_processes * (len(scenes) // total_processes)]
else:
if len(scenes) % total_processes != 0:
print(
"Warning: oversampling some of the scenes to feed all processes."
" You can avoid this by setting a number of workers divisor of the number of scenes"
)
inds = self._partition_inds(len(scenes), total_processes)
return {
"scenes": scenes[inds[process_ind] : inds[process_ind + 1]],
"env_args": self.ENV_ARGS,
"max_steps": self.MAX_STEPS,
"sensors": self.SENSORS,
"action_space": gym.spaces.Discrete(
len(self.TASK_SAMPLER._TASK_TYPE.class_action_names())
),
"seed": seeds[process_ind] if seeds is not None else None,
"deterministic_cudnn": deterministic_cudnn,
"rewards_config": self.REWARD_CONFIG,
}
def train_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]] = None,
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
res = self._get_sampler_args_for_scene_split(
self.TRAIN_SCENES,
process_ind,
total_processes,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
)
res["scene_period"] = "manual"
res["sampler_mode"] = "train"
res["cap_training"] = self.CAP_TRAINING
res["env_args"] = {}
res["env_args"].update(self.ENV_ARGS)
res["env_args"]["x_display"] = (
("0.%d" % devices[process_ind % len(devices)]) if len(devices) > 0 else None
)
return res
def valid_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]],
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
res = self._get_sampler_args_for_scene_split(
self.VALID_SCENES,
process_ind,
total_processes,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
)
res["scene_period"] = self.VALID_SAMPLES_IN_SCENE
res["sampler_mode"] = "val"
res["cap_training"] = self.CAP_TRAINING
res["max_tasks"] = self.VALID_SAMPLES_IN_SCENE * len(res["scenes"])
res["env_args"] = {}
res["env_args"].update(self.ENV_ARGS)
res["env_args"]["x_display"] = (
("0.%d" % devices[process_ind % len(devices)]) if len(devices) > 0 else None
)
return res
def test_task_sampler_args(
self,
process_ind: int,
total_processes: int,
devices: Optional[List[int]],
seeds: Optional[List[int]] = None,
deterministic_cudnn: bool = False,
) -> Dict[str, Any]:
res = self._get_sampler_args_for_scene_split(
self.TEST_SCENES,
process_ind,
total_processes,
seeds=seeds,
deterministic_cudnn=deterministic_cudnn,
)
res["scene_period"] = self.TEST_SAMPLES_IN_SCENE
res["sampler_mode"] = "test"
res["env_args"] = {}
res["cap_training"] = self.CAP_TRAINING
res["env_args"].update(self.ENV_ARGS)
res["env_args"]["x_display"] = (
("0.%d" % devices[process_ind % len(devices)]) if len(devices) > 0 else None
)
return res
|
allenact-main
|
projects/manipulathor_baselines/armpointnav_baselines/experiments/armpointnav_thor_base.py
|
from abc import ABC
from typing import Optional, Sequence, Union
from allenact.base_abstractions.experiment_config import ExperimentConfig
from allenact.base_abstractions.preprocessor import Preprocessor
from allenact.base_abstractions.sensor import Sensor
from allenact.utils.experiment_utils import Builder
class ArmPointNavBaseConfig(ExperimentConfig, ABC):
"""The base object navigation configuration file."""
ADVANCE_SCENE_ROLLOUT_PERIOD: Optional[int] = None
SENSORS: Optional[Sequence[Sensor]] = None
STEP_SIZE = 0.25
ROTATION_DEGREES = 45.0
VISIBILITY_DISTANCE = 1.0
STOCHASTIC = False
CAMERA_WIDTH = 224
CAMERA_HEIGHT = 224
SCREEN_SIZE = 224
MAX_STEPS = 200
def __init__(self):
self.REWARD_CONFIG = {
"step_penalty": -0.01,
"goal_success_reward": 10.0,
"pickup_success_reward": 5.0,
"failed_stop_reward": 0.0,
"shaping_weight": 1.0, # we are not using this
"failed_action_penalty": -0.03,
}
@classmethod
def preprocessors(cls) -> Sequence[Union[Preprocessor, Builder[Preprocessor]]]:
return tuple()
|
allenact-main
|
projects/manipulathor_baselines/armpointnav_baselines/experiments/armpointnav_base.py
|
import torch.optim as optim
from allenact.algorithms.onpolicy_sync.losses import PPO
from allenact.algorithms.onpolicy_sync.losses.ppo import PPOConfig
from allenact.utils.experiment_utils import (
Builder,
PipelineStage,
TrainingPipeline,
LinearDecay,
)
from torch.optim.lr_scheduler import LambdaLR
from projects.manipulathor_baselines.armpointnav_baselines.experiments.armpointnav_base import (
ArmPointNavBaseConfig,
)
class ArmPointNavMixInPPOConfig(ArmPointNavBaseConfig):
def training_pipeline(self, **kwargs):
ppo_steps = int(300000000)
lr = 3e-4
num_mini_batch = 1
update_repeats = 4
num_steps = self.MAX_STEPS
save_interval = 500000 # from 50k
log_interval = 1000
gamma = 0.99
use_gae = True
gae_lambda = 0.95
max_grad_norm = 0.5
return TrainingPipeline(
save_interval=save_interval,
metric_accumulate_interval=log_interval,
optimizer_builder=Builder(optim.Adam, dict(lr=lr)),
num_mini_batch=num_mini_batch,
update_repeats=update_repeats,
max_grad_norm=max_grad_norm,
num_steps=num_steps,
named_losses={"ppo_loss": PPO(**PPOConfig)},
gamma=gamma,
use_gae=use_gae,
gae_lambda=gae_lambda,
advance_scene_rollout_period=self.ADVANCE_SCENE_ROLLOUT_PERIOD,
pipeline_stages=[
PipelineStage(loss_names=["ppo_loss"], max_stage_steps=ppo_steps)
],
lr_scheduler_builder=Builder(
LambdaLR, {"lr_lambda": LinearDecay(steps=ppo_steps)}
),
)
|
allenact-main
|
projects/manipulathor_baselines/armpointnav_baselines/experiments/armpointnav_mixin_ddppo.py
|
allenact-main
|
projects/manipulathor_baselines/armpointnav_baselines/experiments/__init__.py
|
|
from typing import Sequence, Union
import gym
import torch.nn as nn
from allenact.base_abstractions.preprocessor import Preprocessor
from allenact.base_abstractions.task import TaskSampler
from allenact.utils.experiment_utils import Builder
from projects.manipulathor_baselines.armpointnav_baselines.experiments.armpointnav_base import (
ArmPointNavBaseConfig,
)
from projects.manipulathor_baselines.armpointnav_baselines.models.arm_pointnav_models import (
ArmPointNavBaselineActorCritic,
)
class ArmPointNavMixInSimpleGRUConfig(ArmPointNavBaseConfig):
TASK_SAMPLER: TaskSampler
@classmethod
def preprocessors(cls) -> Sequence[Union[Preprocessor, Builder[Preprocessor]]]:
preprocessors = []
return preprocessors
@classmethod
def create_model(cls, **kwargs) -> nn.Module:
return ArmPointNavBaselineActorCritic(
action_space=gym.spaces.Discrete(
len(cls.TASK_SAMPLER._TASK_TYPE.class_action_names())
),
observation_space=kwargs["sensor_preprocessor_graph"].observation_spaces,
hidden_size=512,
)
|
allenact-main
|
projects/manipulathor_baselines/armpointnav_baselines/experiments/armpointnav_mixin_simplegru.py
|
from allenact_plugins.manipulathor_plugin.manipulathor_constants import ENV_ARGS
from allenact_plugins.manipulathor_plugin.manipulathor_sensors import (
NoVisionSensorThor,
RelativeAgentArmToObjectSensor,
RelativeObjectToGoalSensor,
PickedUpObjSensor,
)
from allenact_plugins.manipulathor_plugin.manipulathor_task_samplers import (
ArmPointNavTaskSampler,
)
from projects.manipulathor_baselines.armpointnav_baselines.experiments.armpointnav_mixin_ddppo import (
ArmPointNavMixInPPOConfig,
)
from projects.manipulathor_baselines.armpointnav_baselines.experiments.armpointnav_mixin_simplegru import (
ArmPointNavMixInSimpleGRUConfig,
)
from projects.manipulathor_baselines.armpointnav_baselines.experiments.ithor.armpointnav_ithor_base import (
ArmPointNaviThorBaseConfig,
)
class ArmPointNavNoVision(
ArmPointNaviThorBaseConfig,
ArmPointNavMixInPPOConfig,
ArmPointNavMixInSimpleGRUConfig,
):
"""An Object Navigation experiment configuration in iThor with RGB
input."""
SENSORS = [
NoVisionSensorThor(
height=ArmPointNaviThorBaseConfig.SCREEN_SIZE,
width=ArmPointNaviThorBaseConfig.SCREEN_SIZE,
use_resnet_normalization=False,
uuid="rgb_lowres",
),
RelativeAgentArmToObjectSensor(),
RelativeObjectToGoalSensor(),
PickedUpObjSensor(),
]
MAX_STEPS = 200
TASK_SAMPLER = ArmPointNavTaskSampler #
def __init__(self):
super().__init__()
assert (
self.CAMERA_WIDTH == 224
and self.CAMERA_HEIGHT == 224
and self.VISIBILITY_DISTANCE == 1
and self.STEP_SIZE == 0.25
)
self.ENV_ARGS = {**ENV_ARGS, "renderDepthImage": False}
@classmethod
def tag(cls):
return cls.__name__
|
allenact-main
|
projects/manipulathor_baselines/armpointnav_baselines/experiments/ithor/armpointnav_no_vision.py
|
from abc import ABC
from allenact_plugins.manipulathor_plugin.armpointnav_constants import (
TRAIN_OBJECTS,
TEST_OBJECTS,
)
from projects.manipulathor_baselines.armpointnav_baselines.experiments.armpointnav_thor_base import (
ArmPointNavThorBaseConfig,
)
class ArmPointNaviThorBaseConfig(ArmPointNavThorBaseConfig, ABC):
"""The base config for all iTHOR ObjectNav experiments."""
NUM_PROCESSES = 40
# add all the arguments here
TOTAL_NUMBER_SCENES = 30
TRAIN_SCENES = [
"FloorPlan{}_physics".format(str(i))
for i in range(1, TOTAL_NUMBER_SCENES + 1)
if (i % 3 == 1 or i % 3 == 0) and i != 28
] # last scenes are really bad
TEST_SCENES = [
"FloorPlan{}_physics".format(str(i))
for i in range(1, TOTAL_NUMBER_SCENES + 1)
if i % 3 == 2 and i % 6 == 2
]
VALID_SCENES = [
"FloorPlan{}_physics".format(str(i))
for i in range(1, TOTAL_NUMBER_SCENES + 1)
if i % 3 == 2 and i % 6 == 5
]
ALL_SCENES = TRAIN_SCENES + TEST_SCENES + VALID_SCENES
assert (
len(ALL_SCENES) == TOTAL_NUMBER_SCENES - 1
and len(set(ALL_SCENES)) == TOTAL_NUMBER_SCENES - 1
)
OBJECT_TYPES = tuple(sorted(TRAIN_OBJECTS))
UNSEEN_OBJECT_TYPES = tuple(sorted(TEST_OBJECTS))
|
allenact-main
|
projects/manipulathor_baselines/armpointnav_baselines/experiments/ithor/armpointnav_ithor_base.py
|
from allenact_plugins.manipulathor_plugin.manipulathor_constants import ENV_ARGS
from allenact_plugins.manipulathor_plugin.manipulathor_sensors import (
DepthSensorThor,
RelativeAgentArmToObjectSensor,
RelativeObjectToGoalSensor,
PickedUpObjSensor,
)
from allenact_plugins.manipulathor_plugin.manipulathor_task_samplers import (
ArmPointNavTaskSampler,
)
from projects.manipulathor_baselines.armpointnav_baselines.experiments.armpointnav_mixin_ddppo import (
ArmPointNavMixInPPOConfig,
)
from projects.manipulathor_baselines.armpointnav_baselines.experiments.armpointnav_mixin_simplegru import (
ArmPointNavMixInSimpleGRUConfig,
)
from projects.manipulathor_baselines.armpointnav_baselines.experiments.ithor.armpointnav_ithor_base import (
ArmPointNaviThorBaseConfig,
)
class ArmPointNavDepth(
ArmPointNaviThorBaseConfig,
ArmPointNavMixInPPOConfig,
ArmPointNavMixInSimpleGRUConfig,
):
"""An Object Navigation experiment configuration in iThor with RGB
input."""
SENSORS = [
DepthSensorThor(
height=ArmPointNaviThorBaseConfig.SCREEN_SIZE,
width=ArmPointNaviThorBaseConfig.SCREEN_SIZE,
use_normalization=True,
uuid="depth_lowres",
),
RelativeAgentArmToObjectSensor(),
RelativeObjectToGoalSensor(),
PickedUpObjSensor(),
]
MAX_STEPS = 200
TASK_SAMPLER = ArmPointNavTaskSampler
def __init__(self):
super().__init__()
assert (
self.CAMERA_WIDTH == 224
and self.CAMERA_HEIGHT == 224
and self.VISIBILITY_DISTANCE == 1
and self.STEP_SIZE == 0.25
)
self.ENV_ARGS = {**ENV_ARGS, "renderDepthImage": True}
@classmethod
def tag(cls):
return cls.__name__
|
allenact-main
|
projects/manipulathor_baselines/armpointnav_baselines/experiments/ithor/armpointnav_depth.py
|
allenact-main
|
projects/manipulathor_baselines/armpointnav_baselines/experiments/ithor/__init__.py
|
|
from allenact_plugins.ithor_plugin.ithor_sensors import RGBSensorThor
from allenact_plugins.manipulathor_plugin.manipulathor_constants import ENV_ARGS
from allenact_plugins.manipulathor_plugin.manipulathor_sensors import (
RelativeAgentArmToObjectSensor,
RelativeObjectToGoalSensor,
PickedUpObjSensor,
)
from allenact_plugins.manipulathor_plugin.manipulathor_task_samplers import (
ArmPointNavTaskSampler,
)
from projects.manipulathor_baselines.armpointnav_baselines.experiments.armpointnav_mixin_ddppo import (
ArmPointNavMixInPPOConfig,
)
from projects.manipulathor_baselines.armpointnav_baselines.experiments.armpointnav_mixin_simplegru import (
ArmPointNavMixInSimpleGRUConfig,
)
from projects.manipulathor_baselines.armpointnav_baselines.experiments.ithor.armpointnav_ithor_base import (
ArmPointNaviThorBaseConfig,
)
class ArmPointNavRGB(
ArmPointNaviThorBaseConfig,
ArmPointNavMixInPPOConfig,
ArmPointNavMixInSimpleGRUConfig,
):
"""An Object Navigation experiment configuration in iThor with RGB
input."""
SENSORS = [
RGBSensorThor(
height=ArmPointNaviThorBaseConfig.SCREEN_SIZE,
width=ArmPointNaviThorBaseConfig.SCREEN_SIZE,
use_resnet_normalization=True,
uuid="rgb_lowres",
),
RelativeAgentArmToObjectSensor(),
RelativeObjectToGoalSensor(),
PickedUpObjSensor(),
]
MAX_STEPS = 200
TASK_SAMPLER = ArmPointNavTaskSampler #
def __init__(self):
super().__init__()
assert (
self.CAMERA_WIDTH == 224
and self.CAMERA_HEIGHT == 224
and self.VISIBILITY_DISTANCE == 1
and self.STEP_SIZE == 0.25
)
self.ENV_ARGS = {**ENV_ARGS}
@classmethod
def tag(cls):
return cls.__name__
|
allenact-main
|
projects/manipulathor_baselines/armpointnav_baselines/experiments/ithor/armpointnav_rgb.py
|
from allenact_plugins.ithor_plugin.ithor_sensors import RGBSensorThor
from allenact_plugins.manipulathor_plugin.manipulathor_constants import ENV_ARGS
from allenact_plugins.manipulathor_plugin.manipulathor_sensors import (
DepthSensorThor,
RelativeAgentArmToObjectSensor,
RelativeObjectToGoalSensor,
PickedUpObjSensor,
)
from allenact_plugins.manipulathor_plugin.manipulathor_task_samplers import (
ArmPointNavTaskSampler,
)
from projects.manipulathor_baselines.armpointnav_baselines.experiments.armpointnav_mixin_ddppo import (
ArmPointNavMixInPPOConfig,
)
from projects.manipulathor_baselines.armpointnav_baselines.experiments.armpointnav_mixin_simplegru import (
ArmPointNavMixInSimpleGRUConfig,
)
from projects.manipulathor_baselines.armpointnav_baselines.experiments.ithor.armpointnav_ithor_base import (
ArmPointNaviThorBaseConfig,
)
class ArmPointNavRGBDepth(
ArmPointNaviThorBaseConfig,
ArmPointNavMixInPPOConfig,
ArmPointNavMixInSimpleGRUConfig,
):
"""An Object Navigation experiment configuration in iThor with RGB
input."""
SENSORS = [
DepthSensorThor(
height=ArmPointNaviThorBaseConfig.SCREEN_SIZE,
width=ArmPointNaviThorBaseConfig.SCREEN_SIZE,
use_normalization=True,
uuid="depth_lowres",
),
RGBSensorThor(
height=ArmPointNaviThorBaseConfig.SCREEN_SIZE,
width=ArmPointNaviThorBaseConfig.SCREEN_SIZE,
use_resnet_normalization=True,
uuid="rgb_lowres",
),
RelativeAgentArmToObjectSensor(),
RelativeObjectToGoalSensor(),
PickedUpObjSensor(),
]
MAX_STEPS = 200
TASK_SAMPLER = ArmPointNavTaskSampler #
def __init__(self):
super().__init__()
assert (
self.CAMERA_WIDTH == 224
and self.CAMERA_HEIGHT == 224
and self.VISIBILITY_DISTANCE == 1
and self.STEP_SIZE == 0.25
)
self.ENV_ARGS = {**ENV_ARGS, "renderDepthImage": True}
@classmethod
def tag(cls):
return cls.__name__
|
allenact-main
|
projects/manipulathor_baselines/armpointnav_baselines/experiments/ithor/armpointnav_rgbdepth.py
|
import gym
import torch.nn as nn
from allenact_plugins.manipulathor_plugin.manipulathor_constants import ENV_ARGS
from allenact_plugins.manipulathor_plugin.manipulathor_task_samplers import (
ArmPointNavTaskSampler,
)
from projects.manipulathor_baselines.armpointnav_baselines.experiments.ithor.armpointnav_depth import (
ArmPointNavDepth,
)
from projects.manipulathor_baselines.armpointnav_baselines.models.disjoint_arm_pointnav_models import (
DisjointArmPointNavBaselineActorCritic,
)
class ArmPointNavDisjointDepth(ArmPointNavDepth):
"""An Object Navigation experiment configuration in iThor with RGB
input."""
TASK_SAMPLER = ArmPointNavTaskSampler
def __init__(self):
super().__init__()
assert (
self.CAMERA_WIDTH == 224
and self.CAMERA_HEIGHT == 224
and self.VISIBILITY_DISTANCE == 1
and self.STEP_SIZE == 0.25
)
self.ENV_ARGS = {**ENV_ARGS, "renderDepthImage": True}
@classmethod
def create_model(cls, **kwargs) -> nn.Module:
return DisjointArmPointNavBaselineActorCritic(
action_space=gym.spaces.Discrete(
len(cls.TASK_SAMPLER._TASK_TYPE.class_action_names())
),
observation_space=kwargs["sensor_preprocessor_graph"].observation_spaces,
hidden_size=512,
)
@classmethod
def tag(cls):
return cls.__name__
|
allenact-main
|
projects/manipulathor_baselines/armpointnav_baselines/experiments/ithor/armpointnav_disjoint_depth.py
|
"""Baseline models for use in the Arm Point Navigation task.
Arm Point Navigation is currently available as a Task in ManipulaTHOR.
"""
from typing import Tuple, Optional
import gym
import torch
from gym.spaces.dict import Dict as SpaceDict
from allenact.algorithms.onpolicy_sync.policy import (
ActorCriticModel,
LinearCriticHead,
LinearActorHead,
DistributionType,
Memory,
ObservationType,
)
from allenact.base_abstractions.distributions import CategoricalDistr
from allenact.base_abstractions.misc import ActorCriticOutput
from allenact.embodiedai.models.basic_models import SimpleCNN, RNNStateEncoder
from projects.manipulathor_baselines.armpointnav_baselines.models.manipulathor_net_utils import (
input_embedding_net,
)
class ArmPointNavBaselineActorCritic(ActorCriticModel[CategoricalDistr]):
"""Baseline recurrent actor critic model for armpointnav task.
# Attributes
action_space : The space of actions available to the agent. Currently only discrete
actions are allowed (so this space will always be of type `gym.spaces.Discrete`).
observation_space : The observation space expected by the agent. This observation space
should include (optionally) 'rgb' images and 'depth' images.
hidden_size : The hidden size of the GRU RNN.
object_type_embedding_dim: The dimensionality of the embedding corresponding to the goal
object type.
"""
def __init__(
self,
action_space: gym.spaces.Discrete,
observation_space: SpaceDict,
hidden_size=512,
obj_state_embedding_size=512,
trainable_masked_hidden_state: bool = False,
num_rnn_layers=1,
rnn_type="GRU",
):
"""Initializer.
See class documentation for parameter definitions.
"""
super().__init__(action_space=action_space, observation_space=observation_space)
self._hidden_size = hidden_size
self.object_type_embedding_size = obj_state_embedding_size
sensor_names = self.observation_space.spaces.keys()
self.visual_encoder = SimpleCNN(
self.observation_space,
self._hidden_size,
rgb_uuid="rgb_lowres" if "rgb_lowres" in sensor_names else None,
depth_uuid="depth_lowres" if "depth_lowres" in sensor_names else None,
)
if "rgb_lowres" in sensor_names and "depth_lowres" in sensor_names:
input_visual_feature_num = 2
elif "rgb_lowres" in sensor_names:
input_visual_feature_num = 1
elif "depth_lowres" in sensor_names:
input_visual_feature_num = 1
else:
raise NotImplementedError
self.state_encoder = RNNStateEncoder(
self._hidden_size * input_visual_feature_num + obj_state_embedding_size,
self._hidden_size,
trainable_masked_hidden_state=trainable_masked_hidden_state,
num_layers=num_rnn_layers,
rnn_type=rnn_type,
)
self.actor = LinearActorHead(self._hidden_size, action_space.n)
self.critic = LinearCriticHead(self._hidden_size)
relative_dist_embedding_size = torch.Tensor([3, 100, obj_state_embedding_size])
self.relative_dist_embedding = input_embedding_net(
relative_dist_embedding_size.long().tolist(), dropout=0
)
self.train()
@property
def recurrent_hidden_state_size(self) -> int:
"""The recurrent hidden state size of the model."""
return self._hidden_size
@property
def num_recurrent_layers(self) -> int:
"""Number of recurrent hidden layers."""
return self.state_encoder.num_recurrent_layers
def _recurrent_memory_specification(self):
return dict(
rnn=(
(
("layer", self.num_recurrent_layers),
("sampler", None),
("hidden", self.recurrent_hidden_state_size),
),
torch.float32,
)
)
def get_relative_distance_embedding(
self, state_tensor: torch.Tensor
) -> torch.FloatTensor:
return self.relative_dist_embedding(state_tensor)
def forward( # type:ignore
self,
observations: ObservationType,
memory: Memory,
prev_actions: torch.Tensor,
masks: torch.FloatTensor,
) -> Tuple[ActorCriticOutput[DistributionType], Optional[Memory]]:
"""Processes input batched observations to produce new actor and critic
values. Processes input batched observations (along with prior hidden
states, previous actions, and masks denoting which recurrent hidden
states should be masked) and returns an `ActorCriticOutput` object
containing the model's policy (distribution over actions) and
evaluation of the current state (value).
# Parameters
observations : Batched input observations.
memory : `Memory` containing the hidden states from initial timepoints.
prev_actions : Tensor of previous actions taken.
masks : Masks applied to hidden states. See `RNNStateEncoder`.
# Returns
Tuple of the `ActorCriticOutput` and recurrent hidden state.
"""
arm2obj_dist = self.get_relative_distance_embedding(
observations["relative_agent_arm_to_obj"]
)
obj2goal_dist = self.get_relative_distance_embedding(
observations["relative_obj_to_goal"]
)
perception_embed = self.visual_encoder(observations)
pickup_bool = observations["pickedup_object"]
after_pickup = pickup_bool == 1
distances = arm2obj_dist
distances[after_pickup] = obj2goal_dist[after_pickup]
x = [distances, perception_embed]
x_cat = torch.cat(x, dim=-1)
x_out, rnn_hidden_states = self.state_encoder(
x_cat, memory.tensor("rnn"), masks
)
actor_out = self.actor(x_out)
critic_out = self.critic(x_out)
actor_critic_output = ActorCriticOutput(
distributions=actor_out, values=critic_out, extras={}
)
updated_memory = memory.set_tensor("rnn", rnn_hidden_states)
return (
actor_critic_output,
updated_memory,
)
|
allenact-main
|
projects/manipulathor_baselines/armpointnav_baselines/models/arm_pointnav_models.py
|
import torch
import torch.nn as nn
class LinearActorHeadNoCategory(nn.Module):
def __init__(self, num_inputs: int, num_outputs: int):
super().__init__()
self.linear = nn.Linear(num_inputs, num_outputs)
nn.init.orthogonal_(self.linear.weight, gain=0.01)
nn.init.constant_(self.linear.bias, 0)
def forward(self, x: torch.FloatTensor): # type: ignore
x = self.linear(x) # type:ignore
assert len(x.shape) == 3
return x
|
allenact-main
|
projects/manipulathor_baselines/armpointnav_baselines/models/base_models.py
|
allenact-main
|
projects/manipulathor_baselines/armpointnav_baselines/models/__init__.py
|
|
"""Baseline models for use in the Arm Point Navigation task.
Arm Point Navigation is currently available as a Task in ManipulaTHOR.
"""
from typing import Tuple, Optional
import gym
import torch
from gym.spaces.dict import Dict as SpaceDict
from allenact.algorithms.onpolicy_sync.policy import (
ActorCriticModel,
LinearCriticHead,
DistributionType,
Memory,
ObservationType,
)
from allenact.base_abstractions.distributions import CategoricalDistr
from allenact.base_abstractions.misc import ActorCriticOutput
from allenact.embodiedai.models.basic_models import SimpleCNN, RNNStateEncoder
from projects.manipulathor_baselines.armpointnav_baselines.models.base_models import (
LinearActorHeadNoCategory,
)
from projects.manipulathor_baselines.armpointnav_baselines.models.manipulathor_net_utils import (
input_embedding_net,
)
class DisjointArmPointNavBaselineActorCritic(ActorCriticModel[CategoricalDistr]):
"""Disjoint Baseline recurrent actor critic model for armpointnav.
# Attributes
action_space : The space of actions available to the agent. Currently only discrete
actions are allowed (so this space will always be of type `gym.spaces.Discrete`).
observation_space : The observation space expected by the agent. This observation space
should include (optionally) 'rgb' images and 'depth' images and is required to
have a component corresponding to the goal `goal_sensor_uuid`.
goal_sensor_uuid : The uuid of the sensor of the goal object. See `GoalObjectTypeThorSensor`
as an example of such a sensor.
hidden_size : The hidden size of the GRU RNN.
object_type_embedding_dim: The dimensionality of the embedding corresponding to the goal
object type.
"""
def __init__(
self,
action_space: gym.spaces.Discrete,
observation_space: SpaceDict,
hidden_size=512,
obj_state_embedding_size=512,
trainable_masked_hidden_state: bool = False,
num_rnn_layers=1,
rnn_type="GRU",
):
"""Initializer.
See class documentation for parameter definitions.
"""
super().__init__(action_space=action_space, observation_space=observation_space)
self._hidden_size = hidden_size
self.object_type_embedding_size = obj_state_embedding_size
self.visual_encoder_pick = SimpleCNN(
self.observation_space,
self._hidden_size,
rgb_uuid=None,
depth_uuid="depth_lowres",
)
self.visual_encoder_drop = SimpleCNN(
self.observation_space,
self._hidden_size,
rgb_uuid=None,
depth_uuid="depth_lowres",
)
self.state_encoder = RNNStateEncoder(
self._hidden_size + obj_state_embedding_size,
self._hidden_size,
trainable_masked_hidden_state=trainable_masked_hidden_state,
num_layers=num_rnn_layers,
rnn_type=rnn_type,
)
self.actor_pick = LinearActorHeadNoCategory(self._hidden_size, action_space.n)
self.critic_pick = LinearCriticHead(self._hidden_size)
self.actor_drop = LinearActorHeadNoCategory(self._hidden_size, action_space.n)
self.critic_drop = LinearCriticHead(self._hidden_size)
# self.object_state_embedding = nn.Embedding(num_embeddings=6, embedding_dim=obj_state_embedding_size)
relative_dist_embedding_size = torch.Tensor([3, 100, obj_state_embedding_size])
self.relative_dist_embedding_pick = input_embedding_net(
relative_dist_embedding_size.long().tolist(), dropout=0
)
self.relative_dist_embedding_drop = input_embedding_net(
relative_dist_embedding_size.long().tolist(), dropout=0
)
self.train()
@property
def recurrent_hidden_state_size(self) -> int:
"""The recurrent hidden state size of the model."""
return self._hidden_size
@property
def num_recurrent_layers(self) -> int:
"""Number of recurrent hidden layers."""
return self.state_encoder.num_recurrent_layers
def _recurrent_memory_specification(self):
return dict(
rnn=(
(
("layer", self.num_recurrent_layers),
("sampler", None),
("hidden", self.recurrent_hidden_state_size),
),
torch.float32,
)
)
def forward( # type:ignore
self,
observations: ObservationType,
memory: Memory,
prev_actions: torch.Tensor,
masks: torch.FloatTensor,
) -> Tuple[ActorCriticOutput[DistributionType], Optional[Memory]]:
"""Processes input batched observations to produce new actor and critic
values. Processes input batched observations (along with prior hidden
states, previous actions, and masks denoting which recurrent hidden
states should be masked) and returns an `ActorCriticOutput` object
containing the model's policy (distribution over actions) and
evaluation of the current state (value).
# Parameters
observations : Batched input observations.
memory : `Memory` containing the hidden states from initial timepoints.
prev_actions : Tensor of previous actions taken.
masks : Masks applied to hidden states. See `RNNStateEncoder`.
# Returns
Tuple of the `ActorCriticOutput` and recurrent hidden state.
"""
arm2obj_dist = self.relative_dist_embedding_pick(
observations["relative_agent_arm_to_obj"]
)
obj2goal_dist = self.relative_dist_embedding_drop(
observations["relative_obj_to_goal"]
)
perception_embed_pick = self.visual_encoder_pick(observations)
perception_embed_drop = self.visual_encoder_drop(observations)
pickup_bool = observations["pickedup_object"]
after_pickup = pickup_bool == 1
distances = arm2obj_dist
distances[after_pickup] = obj2goal_dist[after_pickup]
perception_embed = perception_embed_pick
perception_embed[after_pickup] = perception_embed_drop[after_pickup]
x = [distances, perception_embed]
x_cat = torch.cat(x, dim=-1) # type: ignore
x_out, rnn_hidden_states = self.state_encoder(
x_cat, memory.tensor("rnn"), masks
)
actor_out_pick = self.actor_pick(x_out)
critic_out_pick = self.critic_pick(x_out)
actor_out_drop = self.actor_drop(x_out)
critic_out_drop = self.critic_drop(x_out)
actor_out = actor_out_pick
actor_out[after_pickup] = actor_out_drop[after_pickup]
critic_out = critic_out_pick
critic_out[after_pickup] = critic_out_drop[after_pickup]
actor_out = CategoricalDistr(logits=actor_out)
actor_critic_output = ActorCriticOutput(
distributions=actor_out, values=critic_out, extras={}
)
updated_memory = memory.set_tensor("rnn", rnn_hidden_states)
return (
actor_critic_output,
updated_memory,
)
|
allenact-main
|
projects/manipulathor_baselines/armpointnav_baselines/models/disjoint_arm_pointnav_models.py
|
import pdb
import torch.nn as nn
import torch.nn.functional as F
def upshuffle(
in_planes, out_planes, upscale_factor, kernel_size=3, stride=1, padding=1
):
return nn.Sequential(
nn.Conv2d(
in_planes,
out_planes * upscale_factor ** 2,
kernel_size=kernel_size,
stride=stride,
padding=padding,
),
nn.PixelShuffle(upscale_factor),
nn.LeakyReLU(),
)
def upshufflenorelu(
in_planes, out_planes, upscale_factor, kernel_size=3, stride=1, padding=1
):
return nn.Sequential(
nn.Conv2d(
in_planes,
out_planes * upscale_factor ** 2,
kernel_size=kernel_size,
stride=stride,
padding=padding,
),
nn.PixelShuffle(upscale_factor),
)
def combine_block_w_bn(in_planes, out_planes):
return nn.Sequential(
nn.Conv2d(in_planes, out_planes, 1, 1),
nn.BatchNorm2d(out_planes),
nn.LeakyReLU(),
)
def conv2d_block(in_planes, out_planes, kernel_size, stride=1, padding=1):
return nn.Sequential(
nn.Conv2d(in_planes, out_planes, kernel_size, stride=stride, padding=padding),
nn.BatchNorm2d(out_planes),
nn.LeakyReLU(),
nn.Conv2d(out_planes, out_planes, kernel_size=3, stride=1, padding=1),
nn.BatchNorm2d(out_planes),
)
def combine_block_w_do(in_planes, out_planes, dropout=0.0):
return nn.Sequential(
nn.Conv2d(in_planes, out_planes, 1, 1), nn.LeakyReLU(), nn.Dropout(dropout),
)
def combine_block_no_do(in_planes, out_planes):
return nn.Sequential(nn.Conv2d(in_planes, out_planes, 1, 1), nn.LeakyReLU(),)
def linear_block(in_features, out_features, dropout=0.0):
return nn.Sequential(
nn.Linear(in_features, out_features), nn.LeakyReLU(), nn.Dropout(dropout),
)
def linear_block_norelu(in_features, out_features):
return nn.Sequential(nn.Linear(in_features, out_features),)
def input_embedding_net(list_of_feature_sizes, dropout=0.0):
modules = []
for i in range(len(list_of_feature_sizes) - 1):
input_size, output_size = list_of_feature_sizes[i : i + 2]
if i + 2 == len(list_of_feature_sizes):
modules.append(linear_block_norelu(input_size, output_size))
else:
modules.append(linear_block(input_size, output_size, dropout=dropout))
return nn.Sequential(*modules)
def _upsample_add(x, y):
_, _, H, W = y.size()
return F.upsample(x, size=(H, W), mode="bilinear") + y
def replace_all_relu_w_leakyrelu(model):
pdb.set_trace()
print("Not sure if using this is a good idea")
modules = model._modules
for m in modules.keys():
module = modules[m]
if isinstance(module, nn.ReLU):
model._modules[m] = nn.LeakyReLU()
elif isinstance(module, nn.Module):
model._modules[m] = replace_all_relu_w_leakyrelu(module)
return model
def replace_all_leakyrelu_w_relu(model):
modules = model._modules
for m in modules.keys():
module = modules[m]
if isinstance(module, nn.LeakyReLU):
model._modules[m] = nn.ReLU()
elif isinstance(module, nn.Module):
model._modules[m] = replace_all_leakyrelu_w_relu(module)
return model
def replace_all_bn_w_groupnorm(model):
pdb.set_trace()
print("Not sure if using this is a good idea")
modules = model._modules
for m in modules.keys():
module = modules[m]
if isinstance(module, nn.BatchNorm2d) or isinstance(module, nn.BatchNorm1d):
feature_number = module.num_features
model._modules[m] = nn.GroupNorm(32, feature_number)
elif isinstance(module, nn.BatchNorm3d):
raise Exception("Not implemented")
elif isinstance(module, nn.Module):
model._modules[m] = replace_all_bn_w_groupnorm(module)
return model
def flat_temporal(tensor, batch_size, sequence_length):
tensor_shape = [s for s in tensor.shape]
assert tensor_shape[0] == batch_size and tensor_shape[1] == sequence_length
result_shape = [batch_size * sequence_length] + tensor_shape[2:]
return tensor.contiguous().view(result_shape)
def unflat_temporal(tensor, batch_size, sequence_length):
tensor_shape = [s for s in tensor.shape]
assert tensor_shape[0] == batch_size * sequence_length
result_shape = [batch_size, sequence_length] + tensor_shape[1:]
return tensor.contiguous().view(result_shape)
|
allenact-main
|
projects/manipulathor_baselines/armpointnav_baselines/models/manipulathor_net_utils.py
|
import json
import os
import re
import shutil
import sys
from pathlib import Path
from urllib.request import urlopen
from allenact.utils.misc_utils import all_equal
DATASET_DIR = os.path.abspath(os.path.dirname(Path(__file__)))
def get_habitat_download_info(allow_create: bool = False):
"""Get a dictionary giving a specification of where habitat data lives
online.
# Parameters
allow_create: Whether or not we should try to regenerate the json file that represents
the above dictionary. This is potentially unsafe so please only set this to `True`
if you're sure it will download what you want.
"""
json_save_path = os.path.join(DATASET_DIR, ".habitat_datasets_download_info.json")
if allow_create and not os.path.exists(json_save_path):
url = "https://raw.githubusercontent.com/facebookresearch/habitat-lab/master/README.md"
output = urlopen(url).read().decode("utf-8")
lines = [l.strip() for l in output.split("\n")]
task_table_started = False
table_lines = []
for l in lines:
if l.count("|") > 3 and l[0] == l[-1] == "|":
if task_table_started:
table_lines.append(l)
elif "Task" in l and "Link" in l:
task_table_started = True
table_lines.append(l)
elif task_table_started:
break
url_pat = re.compile("\[.*\]\((.*)\)")
def get_url(in_str: str):
match = re.match(pattern=url_pat, string=in_str)
if match:
return match.group(1)
else:
return in_str
header = None
rows = []
for i, l in enumerate(table_lines):
l = l.strip("|")
entries = [get_url(e.strip().replace("`", "")) for e in l.split("|")]
if i == 0:
header = [e.lower().replace(" ", "_") for e in entries]
elif not all_equal(entries):
rows.append(entries)
link_ind = header.index("link")
extract_ind = header.index("extract_path")
config_ind = header.index("config_to_use")
assert link_ind >= 0
data_info = {}
for row in rows:
id = row[link_ind].split("/")[-1].replace(".zip", "").replace("_", "-")
data_info[id] = {
"link": row[link_ind],
"rel_path": row[extract_ind],
"config_url": row[config_ind],
}
with open(json_save_path, "w") as f:
json.dump(data_info, f)
with open(json_save_path, "r") as f:
return json.load(f)
if __name__ == "__main__":
habitat_dir = os.path.join(DATASET_DIR, "habitat")
os.makedirs(habitat_dir, exist_ok=True)
os.chdir(habitat_dir)
download_info = get_habitat_download_info(allow_create=False)
if len(sys.argv) != 2 or sys.argv[1] not in download_info:
print(
"Incorrect input, expects a single input where this input is one of "
f" {['test-scenes', *sorted(download_info.keys())]}."
)
quit(1)
task_key = sys.argv[1]
task_dl_info = download_info[task_key]
output_archive_name = "__TO_OVERWRITE__.zip"
deletable_dir_name = "__TO_DELETE__"
cmd = f"wget {task_dl_info['link']} -O {output_archive_name}"
if os.system(cmd):
print(f"ERROR: `{cmd}` failed.")
quit(1)
cmd = f"unzip {output_archive_name} -d {deletable_dir_name}"
if os.system(cmd):
print(f"ERROR: `{cmd}` failed.")
quit(1)
download_to_path = task_dl_info["rel_path"].replace("data/", "")
if download_to_path[-1] == "/":
download_to_path = download_to_path[:-1]
os.makedirs(download_to_path, exist_ok=True)
cmd = f"rsync -avz {deletable_dir_name}/ {download_to_path}/"
if os.system(cmd):
print(f"ERROR: `{cmd}` failed.")
quit(1)
os.remove(output_archive_name)
shutil.rmtree(deletable_dir_name)
|
allenact-main
|
datasets/.habitat_downloader_helper.py
|
allenact-main
|
tests/__init__.py
|
|
allenact-main
|
tests/mapping/__init__.py
|
|
import os
import platform
import random
import sys
import urllib
import urllib.request
import warnings
from collections import defaultdict
# noinspection PyUnresolvedReferences
from tempfile import mkdtemp
from typing import Dict, List, Tuple, cast
# noinspection PyUnresolvedReferences
import ai2thor
# noinspection PyUnresolvedReferences
import ai2thor.wsgi_server
import compress_pickle
import numpy as np
import torch
from allenact.algorithms.onpolicy_sync.storage import RolloutBlockStorage
from allenact.base_abstractions.misc import Memory, ActorCriticOutput
from allenact.embodiedai.mapping.mapping_utils.map_builders import SemanticMapBuilder
from allenact.utils.experiment_utils import set_seed
from allenact.utils.system import get_logger
from allenact.utils.tensor_utils import batch_observations
from allenact_plugins.ithor_plugin.ithor_sensors import (
RelativePositionChangeTHORSensor,
ReachableBoundsTHORSensor,
BinnedPointCloudMapTHORSensor,
SemanticMapTHORSensor,
)
from allenact_plugins.ithor_plugin.ithor_util import get_open_x_displays
from allenact_plugins.robothor_plugin.robothor_sensors import DepthSensorThor
from constants import ABS_PATH_OF_TOP_LEVEL_DIR
class TestAI2THORMapSensors(object):
def setup_path_for_use_with_rearrangement_project(self) -> bool:
if platform.system() != "Darwin" and len(get_open_x_displays()) == 0:
wrn_msg = "Cannot run tests as there seem to be no open displays!"
warnings.warn(wrn_msg)
get_logger().warning(wrn_msg)
return False
os.chdir(ABS_PATH_OF_TOP_LEVEL_DIR)
sys.path.append(
os.path.join(ABS_PATH_OF_TOP_LEVEL_DIR, "projects/ithor_rearrangement")
)
try:
import rearrange
except ImportError:
wrn_msg = (
"Could not import `rearrange`. Is it possible you have"
" not initialized the submodules (i.e. by running"
" `git submodule init; git submodule update;`)?"
)
warnings.warn(wrn_msg)
get_logger().warning(wrn_msg)
return False
return True
def test_binned_and_semantic_mapping(self, tmpdir):
try:
if not self.setup_path_for_use_with_rearrangement_project():
return
from baseline_configs.rearrange_base import RearrangeBaseExperimentConfig
from baseline_configs.walkthrough.walkthrough_rgb_base import (
WalkthroughBaseExperimentConfig,
)
from rearrange.constants import (
FOV,
PICKUPABLE_OBJECTS,
OPENABLE_OBJECTS,
)
from datagen.datagen_utils import get_scenes
ORDERED_OBJECT_TYPES = list(sorted(PICKUPABLE_OBJECTS + OPENABLE_OBJECTS))
map_range_sensor = ReachableBoundsTHORSensor(margin=1.0)
map_info = dict(
map_range_sensor=map_range_sensor,
vision_range_in_cm=40 * 5,
map_size_in_cm=1050,
resolution_in_cm=5,
)
map_sensors = [
RelativePositionChangeTHORSensor(),
map_range_sensor,
DepthSensorThor(
height=224, width=224, use_normalization=False, uuid="depth",
),
BinnedPointCloudMapTHORSensor(fov=FOV, ego_only=False, **map_info,),
SemanticMapTHORSensor(
fov=FOV,
ego_only=False,
ordered_object_types=ORDERED_OBJECT_TYPES,
**map_info,
),
]
all_sensors = [*WalkthroughBaseExperimentConfig.SENSORS, *map_sensors]
open_x_displays = []
try:
open_x_displays = get_open_x_displays()
except (AssertionError, IOError):
pass
walkthrough_task_sampler = WalkthroughBaseExperimentConfig.make_sampler_fn(
stage="train",
sensors=all_sensors,
scene_to_allowed_rearrange_inds={s: [0] for s in get_scenes("train")},
force_cache_reset=True,
allowed_scenes=None,
seed=1,
x_display=open_x_displays[0] if len(open_x_displays) != 0 else None,
thor_controller_kwargs={
**RearrangeBaseExperimentConfig.THOR_CONTROLLER_KWARGS,
# "server_class": ai2thor.wsgi_server.WsgiServer, # Only for debugging
},
)
targets_path = os.path.join(tmpdir, "rearrange_mapping_examples.pkl.gz")
urllib.request.urlretrieve(
"https://ai2-prior-allenact-public-test.s3-us-west-2.amazonaws.com/ai2thor_mapping/rearrange_mapping_examples.pkl.gz",
targets_path,
)
goal_obs_dict = compress_pickle.load(targets_path)
def compare_recursive(obs, goal_obs, key_list: List):
if isinstance(obs, Dict):
for k in goal_obs:
compare_recursive(
obs=obs[k], goal_obs=goal_obs[k], key_list=key_list + [k]
)
elif isinstance(obs, (List, Tuple)):
for i in range(len(goal_obs)):
compare_recursive(
obs=obs[i], goal_obs=goal_obs[i], key_list=key_list + [i]
)
else:
# Should be a numpy array at this point
assert isinstance(obs, np.ndarray) and isinstance(
goal_obs, np.ndarray
), f"After {key_list}, not numpy arrays, obs={obs}, goal_obs={goal_obs}"
obs = 1.0 * obs
goal_obs = 1.0 * goal_obs
goal_where_nan = np.isnan(goal_obs)
obs_where_nan = np.isnan(obs)
where_nan_not_equal = (goal_where_nan != obs_where_nan).sum()
assert (
where_nan_not_equal.sum() <= 1
and where_nan_not_equal.mean() < 1e3
)
where_nan = np.logical_or(goal_where_nan, obs_where_nan)
obs[where_nan] = 0.0
goal_obs[where_nan] = 0.0
def special_mean(v):
while len(v.shape) > 2:
v = v.sum(-1)
return v.mean()
numer = np.abs(obs - goal_obs)
denom = np.abs(
np.stack((obs, goal_obs, np.ones_like(obs)), axis=0)
).max(0)
difference = special_mean(numer / denom)
assert (
difference < 1.2e-3
), f"Difference of {np.abs(obs - goal_obs).mean()} at {key_list}."
if (
len(obs.shape) >= 2
and obs.shape[0] == obs.shape[1]
and obs.shape[0] > 1
):
# Sanity check that rotating the observations makes them not-equal
rot_obs = np.rot90(obs)
numer = np.abs(rot_obs - goal_obs)
denom = np.abs(
np.stack((rot_obs, goal_obs, np.ones_like(obs)), axis=0)
).max(0)
rot_difference = special_mean(numer / denom)
assert (
difference < rot_difference or (obs == rot_obs).all()
), f"Too small a difference ({(numer / denom).mean()})."
observations_dict = defaultdict(lambda: [])
for i in range(5): # Why 5, why not 5?
set_seed(i)
task = walkthrough_task_sampler.next_task()
obs_list = observations_dict[i]
obs_list.append(task.get_observations())
k = 0
compare_recursive(
obs=obs_list[0], goal_obs=goal_obs_dict[i][0], key_list=[i, k]
)
while not task.is_done():
obs = task.step(
action=task.action_names().index(
random.choice(
3
* [
"move_ahead",
"rotate_right",
"rotate_left",
"look_up",
"look_down",
]
+ ["done"]
)
)
).observation
k += 1
obs_list.append(obs)
compare_recursive(
obs=obs,
goal_obs=goal_obs_dict[i][task.num_steps_taken()],
key_list=[i, k],
)
# Free space metric map in RGB using pointclouds coming from depth images. This
# is built iteratively after every step.
# R - is used to encode points at a height < 0.02m (i.e. the floor)
# G - is used to encode points at a height between 0.02m and 2m, i.e. objects the agent would run into
# B - is used to encode points higher than 2m, i.e. ceiling
# Uncomment if you wish to visualize the observations:
# import matplotlib.pyplot as plt
# plt.imshow(
# np.flip(255 * (obs["binned_pc_map"]["map"] > 0), 0)
# ) # np.flip because we expect "up" to be -row
# plt.title("Free space map")
# plt.show()
# plt.close()
# See also `obs["binned_pc_map"]["egocentric_update"]` to see the
# the metric map from the point of view of the agent before it is
# rotated into the world-space coordinates and merged with past observations.
# Semantic map in RGB which is iteratively revealed using depth maps to figure out what
# parts of the scene the agent has seen so far.
# This map has shape 210x210x72 with the 72 channels corresponding to the 72
# object types in `ORDERED_OBJECT_TYPES`
semantic_map = obs["semantic_map"]["map"]
# We can't display all 72 channels in an RGB image so instead we randomly assign
# each object a color and then just allow them to overlap each other
colored_semantic_map = SemanticMapBuilder.randomly_color_semantic_map(
semantic_map
)
# Here's the full semantic map with nothing masked out because the agent
# hasn't seen it yet
colored_semantic_map_no_fog = SemanticMapBuilder.randomly_color_semantic_map(
map_sensors[-1].semantic_map_builder.ground_truth_semantic_map
)
# Uncomment if you wish to visualize the observations:
# import matplotlib.pyplot as plt
# plt.imshow(
# np.flip( # np.flip because we expect "up" to be -row
# np.concatenate(
# (
# colored_semantic_map,
# 255 + 0 * colored_semantic_map[:, :10, :],
# colored_semantic_map_no_fog,
# ),
# axis=1,
# ),
# 0,
# )
# )
# plt.title("Semantic map with and without exploration fog")
# plt.show()
# plt.close()
# See also
# * `obs["semantic_map"]["egocentric_update"]`
# * `obs["semantic_map"]["explored_mask"]`
# * `obs["semantic_map"]["egocentric_mask"]`
# To save observations for comparison against future runs, uncomment the below.
# os.makedirs("tmp_out", exist_ok=True)
# compress_pickle.dump(
# {**observations_dict}, "tmp_out/rearrange_mapping_examples.pkl.gz"
# )
finally:
try:
walkthrough_task_sampler.close()
except NameError:
pass
def test_pretrained_rearrange_walkthrough_mapping_agent(self, tmpdir):
try:
if not self.setup_path_for_use_with_rearrangement_project():
return
from baseline_configs.rearrange_base import RearrangeBaseExperimentConfig
from baseline_configs.walkthrough.walkthrough_rgb_mapping_ppo import (
WalkthroughRGBMappingPPOExperimentConfig,
)
from rearrange.constants import (
FOV,
PICKUPABLE_OBJECTS,
OPENABLE_OBJECTS,
)
from datagen.datagen_utils import get_scenes
open_x_displays = []
try:
open_x_displays = get_open_x_displays()
except (AssertionError, IOError):
pass
walkthrough_task_sampler = WalkthroughRGBMappingPPOExperimentConfig.make_sampler_fn(
stage="train",
scene_to_allowed_rearrange_inds={s: [0] for s in get_scenes("train")},
force_cache_reset=True,
allowed_scenes=None,
seed=2,
x_display=open_x_displays[0] if len(open_x_displays) != 0 else None,
)
named_losses = (
WalkthroughRGBMappingPPOExperimentConfig.training_pipeline()._named_losses
)
ckpt_path = os.path.join(
tmpdir, "pretrained_walkthrough_mapping_agent_75mil.pt"
)
if not os.path.exists(ckpt_path):
urllib.request.urlretrieve(
"https://prior-model-weights.s3.us-east-2.amazonaws.com/embodied-ai/rearrangement/walkthrough/pretrained_walkthrough_mapping_agent_75mil.pt",
ckpt_path,
)
state_dict = torch.load(ckpt_path, map_location="cpu",)
walkthrough_model = WalkthroughRGBMappingPPOExperimentConfig.create_model()
walkthrough_model.load_state_dict(state_dict["model_state_dict"])
memory = RolloutBlockStorage.create_memory(
spec=walkthrough_model.recurrent_memory_specification, num_samplers=1
).step_squeeze(0)
masks = torch.FloatTensor([0]).view(1, 1, 1)
binned_map_losses = []
semantic_map_losses = []
for i in range(5):
masks = 0 * masks
set_seed(i + 1)
task = walkthrough_task_sampler.next_task()
def add_step_dim(input):
if isinstance(input, torch.Tensor):
return input.unsqueeze(0)
elif isinstance(input, Dict):
return {k: add_step_dim(v) for k, v in input.items()}
else:
raise NotImplementedError
batch = add_step_dim(batch_observations([task.get_observations()]))
while not task.is_done():
# noinspection PyTypeChecker
ac_out, memory = cast(
Tuple[ActorCriticOutput, Memory],
walkthrough_model.forward(
observations=batch,
memory=memory,
prev_actions=None,
masks=masks,
),
)
binned_map_losses.append(
named_losses["binned_map_loss"]
.loss(
step_count=0, # Not used in this loss
batch={"observations": batch},
actor_critic_output=ac_out,
)[0]
.item()
)
assert (
binned_map_losses[-1] < 0.16
), f"Binned map loss to large at ({i}, {task.num_steps_taken()})"
semantic_map_losses.append(
named_losses["semantic_map_loss"]
.loss(
step_count=0, # Not used in this loss
batch={"observations": batch},
actor_critic_output=ac_out,
)[0]
.item()
)
assert (
semantic_map_losses[-1] < 0.004
), f"Semantic map loss to large at ({i}, {task.num_steps_taken()})"
masks = masks.fill_(1.0)
obs = task.step(
action=ac_out.distributions.sample().item()
).observation
batch = add_step_dim(batch_observations([obs]))
if task.num_steps_taken() >= 10:
break
# To save observations for comparison against future runs, uncomment the below.
# os.makedirs("tmp_out", exist_ok=True)
# compress_pickle.dump(
# {**observations_dict}, "tmp_out/rearrange_mapping_examples.pkl.gz"
# )
finally:
try:
walkthrough_task_sampler.close()
except NameError:
pass
if __name__ == "__main__":
TestAI2THORMapSensors().test_binned_and_semantic_mapping(mkdtemp()) # type:ignore
# TestAI2THORMapSensors().test_binned_and_semantic_mapping("tmp_out") # Used for local debugging
# TestAI2THORMapSensors().test_pretrained_rearrange_walkthrough_mapping_agent(
# mkdtemp() # "tmp_out"
# ) # Used for local debugging
|
allenact-main
|
tests/mapping/test_ai2thor_mapping.py
|
from typing import Dict, Any
import torch.multiprocessing as mp
import torch.nn as nn
from allenact.base_abstractions.experiment_config import ExperimentConfig
from allenact.base_abstractions.task import TaskSampler
from allenact.utils.experiment_utils import TrainingPipeline
# noinspection PyAbstractClass,PyTypeChecker
class MyConfig(ExperimentConfig):
MY_VAR: int = 3
@classmethod
def tag(cls) -> str:
return ""
@classmethod
def training_pipeline(cls, **kwargs) -> TrainingPipeline:
return None
@classmethod
def create_model(cls, **kwargs) -> nn.Module:
return None
@classmethod
def make_sampler_fn(cls, **kwargs) -> TaskSampler:
return None
def my_var_is(self, val):
assert self.MY_VAR == val
# noinspection PyAbstractClass
class MySpecConfig(MyConfig):
MY_VAR = 6
@classmethod
def machine_params(cls, mode="train", **kwargs) -> Dict[str, Any]:
return {}
@classmethod
def tag(cls) -> str:
return "SpecTag"
scfg = MySpecConfig()
class TestFrozenAttribs(object):
def test_frozen_inheritance(self):
from abc import abstractmethod
from allenact.base_abstractions.experiment_config import FrozenClassVariables
class SomeBase(metaclass=FrozenClassVariables):
yar = 3
@abstractmethod
def use(self):
raise NotImplementedError()
class SomeDerived(SomeBase):
yar = 33
def use(self):
return self.yar
failed = False
try:
SomeDerived.yar = 6 # Error
except Exception as _:
failed = True
assert failed
inst = SomeDerived()
inst2 = SomeDerived()
inst.yar = 12 # No error
assert inst.use() == 12
assert inst2.use() == 33
@staticmethod
def my_func(config, val):
config.my_var_is(val)
def test_frozen_experiment_config(self):
val = 5
failed = False
try:
MyConfig()
except (RuntimeError, TypeError):
failed = True
assert failed
scfg.MY_VAR = val
scfg.my_var_is(val)
failed = False
try:
MyConfig.MY_VAR = val
except RuntimeError:
failed = True
assert failed
failed = False
try:
MySpecConfig.MY_VAR = val
except RuntimeError:
failed = True
assert failed
for fork_method in ["forkserver", "fork"]:
ctxt = mp.get_context(fork_method)
p = ctxt.Process(target=self.my_func, kwargs=dict(config=scfg, val=val))
p.start()
p.join()
if __name__ == "__main__":
TestFrozenAttribs().test_frozen_inheritance() # type:ignore
TestFrozenAttribs().test_frozen_experiment_config() # type:ignore
|
allenact-main
|
tests/multiprocessing/test_frozen_attribs.py
|
allenact-main
|
tests/multiprocessing/__init__.py
|
|
allenact-main
|
tests/utils/__init__.py
|
|
import torch
from allenact.utils.experiment_utils import set_seed
from allenact.utils.inference import InferenceAgent
from projects.babyai_baselines.experiments.go_to_obj.ppo import (
PPOBabyAIGoToObjExperimentConfig,
)
expected_results = [
{"ep_length": 64, "reward": 0.0, "success": 0.0},
{"ep_length": 64, "reward": 0.0, "success": 0.0},
{"ep_length": 64, "reward": 0.0, "success": 0.0},
{"ep_length": 17, "reward": 0.7646153846153846, "success": 1.0},
{"ep_length": 22, "reward": 0.6953846153846154, "success": 1.0},
{"ep_length": 64, "reward": 0.0, "success": 0.0},
{"ep_length": 64, "reward": 0.0, "success": 0.0},
{"ep_length": 64, "reward": 0.0, "success": 0.0},
{"ep_length": 64, "reward": 0.0, "success": 0.0},
{"ep_length": 64, "reward": 0.0, "success": 0.0},
]
class TestInferenceAgent(object):
def test_inference_agent_from_minigrid_config(self):
set_seed(1)
exp_config = PPOBabyAIGoToObjExperimentConfig()
agent = InferenceAgent.from_experiment_config(
exp_config=exp_config, device=torch.device("cpu"),
)
task_sampler = exp_config.make_sampler_fn(
**exp_config.test_task_sampler_args(process_ind=0, total_processes=1)
)
for ind, expected_result in zip(range(10), expected_results):
agent.reset()
task = task_sampler.next_task()
observations = task.get_observations()
while not task.is_done():
action = agent.act(observations=observations)
observations = task.step(action).observation
assert all(
abs(v - expected_result[k]) < 1e-4
for k, v in task.metrics().items()
if k != "task_info"
)
if __name__ == "__main__":
TestInferenceAgent().test_inference_agent_from_minigrid_config()
|
allenact-main
|
tests/utils/test_inference_agent.py
|
import warnings
from collections import OrderedDict
from typing import Tuple
import numpy as np
import torch
from gym import spaces as gyms
from allenact.utils import spaces_utils as su
class TestSpaces(object):
space = gyms.Dict(
{
"first": gyms.Tuple(
[
gyms.Box(-10, 10, (3, 4)),
gyms.MultiDiscrete([2, 3, 4]),
gyms.Box(-1, 1, ()),
]
),
"second": gyms.Tuple(
[gyms.Dict({"third": gyms.Discrete(11)}), gyms.MultiBinary(8),]
),
}
)
@staticmethod
def same(a, b, bidx=None):
if isinstance(a, OrderedDict):
for key in a:
if not TestSpaces.same(a[key], b[key], bidx):
return False
return True
elif isinstance(a, Tuple):
for it in range(len(a)):
if not TestSpaces.same(a[it], b[it], bidx):
return False
return True
else:
# np.array_equal also works for torch tensors and scalars
if bidx is None:
return np.array_equal(a, b)
else:
return np.array_equal(a, b[bidx])
def test_conversion(self):
gsample = self.space.sample()
asample = su.torch_point(self.space, gsample)
back = su.numpy_point(self.space, asample)
assert self.same(back, gsample)
def test_flatten(self):
# We flatten Discrete to 1 value
assert su.flatdim(self.space) == 25
# gym flattens Discrete to one-hot
assert gyms.flatdim(self.space) == 35
asample = su.torch_point(self.space, self.space.sample())
flattened = su.flatten(self.space, asample)
unflattened = su.unflatten(self.space, flattened)
assert self.same(asample, unflattened)
# suppress `UserWarning: WARN: Box bound precision lowered by casting to float32`
with warnings.catch_warnings():
warnings.simplefilter("ignore")
flattened_space = su.flatten_space(self.space)
assert flattened_space.shape == (25,)
# The maximum comes from Discrete(11)
assert flattened_space.high.max() == 11.0
assert flattened_space.low.min() == -10.0
gym_flattened_space = gyms.flatten_space(self.space)
assert gym_flattened_space.shape == (35,)
# The maximum comes from Box(-10, 10, (3, 4))
assert gym_flattened_space.high.max() == 10.0
assert gym_flattened_space.low.min() == -10.0
def test_batched(self):
samples = [self.space.sample() for _ in range(10)]
flattened = [
su.flatten(self.space, su.torch_point(self.space, sample))
for sample in samples
]
stacked = torch.stack(flattened, dim=0)
unflattened = su.unflatten(self.space, stacked)
for bidx, refsample in enumerate(samples):
# Compare each torch-ified sample to the corresponding unflattened from the stack
assert self.same(su.torch_point(self.space, refsample), unflattened, bidx)
assert self.same(su.flatten(self.space, unflattened), stacked)
def test_tolist(self):
space = gyms.MultiDiscrete([3, 3])
actions = su.torch_point(space, space.sample()) # single sampler
actions = actions.unsqueeze(0).unsqueeze(0) # add [step, sampler]
flat_actions = su.flatten(space, actions)
al = su.action_list(space, flat_actions)
assert len(al) == 1
assert len(al[0]) == 2
space = gyms.Tuple([gyms.MultiDiscrete([3, 3]), gyms.Discrete(2)])
actions = su.torch_point(space, space.sample()) # single sampler
actions = (
actions[0].unsqueeze(0).unsqueeze(0),
torch.tensor(actions[1]).unsqueeze(0).unsqueeze(0),
) # add [step, sampler]
flat_actions = su.flatten(space, actions)
al = su.action_list(space, flat_actions)
assert len(al) == 1
assert len(al[0][0]) == 2
assert isinstance(al[0][1], int)
space = gyms.Dict(
{"tuple": gyms.MultiDiscrete([3, 3]), "scalar": gyms.Discrete(2)}
)
actions = su.torch_point(space, space.sample()) # single sampler
actions = OrderedDict(
[
("tuple", actions["tuple"].unsqueeze(0).unsqueeze(0)),
("scalar", torch.tensor(actions["scalar"]).unsqueeze(0).unsqueeze(0)),
]
)
flat_actions = su.flatten(space, actions)
al = su.action_list(space, flat_actions)
assert len(al) == 1
assert len(al[0]["tuple"]) == 2
assert isinstance(al[0]["scalar"], int)
if __name__ == "__main__":
TestSpaces().test_conversion() # type:ignore
TestSpaces().test_flatten() # type:ignore
TestSpaces().test_batched() # type:ignore
TestSpaces().test_tolist() # type:ignore
|
allenact-main
|
tests/utils/test_spaces.py
|
import hashlib
import os
import imageio
import numpy as np
from torchvision.transforms import transforms
from allenact.utils.tensor_utils import ScaleBothSides
from constants import ABS_PATH_OF_TOP_LEVEL_DIR
to_pil = transforms.ToPILImage() # Same as used by the vision sensors
class TestPillowRescaling(object):
def _load_thor_img(self) -> np.ndarray:
img_path = os.path.join(
ABS_PATH_OF_TOP_LEVEL_DIR, "docs/img/iTHOR_framework.jpg"
)
img = imageio.imread(img_path)
return img
def _get_img_hash(self, img: np.ndarray) -> str:
img_hash = hashlib.sha1(np.ascontiguousarray(img))
return img_hash.hexdigest()
def _random_rgb_image(self, width: int, height: int, seed: int) -> np.ndarray:
s = np.random.get_state()
np.random.seed(seed)
img = np.random.randint(
low=0, high=256, size=(width, height, 3), dtype=np.uint8
)
np.random.set_state(s)
return img
def _random_depthmap(
self, width: int, height: int, max_depth: float, seed: int
) -> np.ndarray:
s = np.random.get_state()
np.random.seed(seed)
img = max_depth * np.random.rand(width, height, 1)
np.random.set_state(s)
return np.float32(img)
def test_scaler_rgb_thor(self):
thor_img_arr = np.uint8(self._load_thor_img())
assert (
self._get_img_hash(thor_img_arr)
== "80ff8a342b4f74966796eee91babde31409d0457"
)
img = to_pil(thor_img_arr)
scaler = ScaleBothSides(width=75, height=75)
scaled_img = np.array(scaler(img))
assert (
self._get_img_hash(scaled_img) == "2c47057aa188240cb21b2edc39e0f269c1085bac"
)
scaler = ScaleBothSides(width=500, height=600)
scaled_img = np.array(scaler(img))
assert (
self._get_img_hash(scaled_img) == "faf0be2b9ec9bfd23a1b7b465c86ad961d03c259"
)
def test_scaler_rgb_random(self):
arr = self._random_rgb_image(width=100, height=100, seed=1)
assert self._get_img_hash(arr) == "d01bd8ba151ab790fde9a8cc29aa8a3c63147334"
img = to_pil(arr)
scaler = ScaleBothSides(width=60, height=60)
scaled_img = np.array(scaler(img))
assert (
self._get_img_hash(scaled_img) == "22473537e50d5e39abeeec4f92dbfde51c754010"
)
scaler = ScaleBothSides(width=1000, height=800)
scaled_img = np.array(scaler(img))
assert (
self._get_img_hash(scaled_img) == "5e5b955981e4ee3b5e22287536040d001a31fbd3"
)
def test_scaler_depth_thor(self):
thor_depth_arr = 5 * np.float32(self._load_thor_img()).sum(-1)
thor_depth_arr /= thor_depth_arr.max()
assert (
self._get_img_hash(thor_depth_arr)
== "d3c1474400ba57ed78f52cf4ba6a4c2a1d90516c"
)
img = to_pil(thor_depth_arr)
scaler = ScaleBothSides(width=75, height=75)
scaled_img = np.array(scaler(img))
assert (
self._get_img_hash(scaled_img) == "6a879beb6bed49021e438c1e3af7a62c428a44d8"
)
scaler = ScaleBothSides(width=500, height=600)
scaled_img = np.array(scaler(img))
assert (
self._get_img_hash(scaled_img) == "79f11fb741ae638afca40125e4c501f54b22cc01"
)
def test_scaler_depth_random(self):
depth_arr = self._random_depthmap(width=96, height=103, max_depth=5.0, seed=1)
assert (
self._get_img_hash(depth_arr) == "cbd8ca127951ffafb6848536d9d731970a5397e9"
)
img = to_pil(depth_arr)
scaler = ScaleBothSides(width=60, height=60)
scaled_img = np.array(scaler(img))
assert (
self._get_img_hash(scaled_img) == "5bed173f2d783fb2badcde9b43904ef85a1a5820"
)
scaler = ScaleBothSides(width=1000, height=800)
scaled_img = np.array(scaler(img))
assert (
self._get_img_hash(scaled_img) == "9dceb7f77d767888f24a84c00913c0cf4ccd9d49"
)
if __name__ == "__main__":
TestPillowRescaling().test_scaler_rgb_thor()
TestPillowRescaling().test_scaler_rgb_random()
TestPillowRescaling().test_scaler_depth_thor()
TestPillowRescaling().test_scaler_depth_random()
|
allenact-main
|
tests/vision/test_pillow_rescaling.py
|
Subsets and Splits
No community queries yet
The top public SQL queries from the community will appear here once available.